First of all, thx for the support.
[14:34:15.467][D][emh1_modbus:123]: Receiving 10 bytes
[14:34:15.467][I][abl_emh1:075]: Status frame received
[14:34:15.467][D][sensor:118]: ‘Outlet state’ >> 161
[14:34:15.468][D][text_sensor:113]: ‘Status’ >> ‘Waiting for EV’
[14:34:15.478][D][sensor:118]: ‘EN1 status’ >> 1
[14:34:15.479][D][sensor:118]: ‘EN2 status’ >> 0
[14:34:15.479][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:34:15.492][D][sensor:118]: ‘Ucp Status <= 10V’ >> 0
[14:34:15.492][D][sensor:118]: ‘L1 current’ >> 0 A
[14:34:15.514][D][sensor:118]: ‘L2 current’ >> 0 A
[14:34:15.514][D][sensor:118]: ‘L3 current’ >> 0 A
[14:34:15.514][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:34:15.514][D][sensor:118]: ‘Max current’ >> 11 A
[14:34:15.514][D][emh1_modbus:156]: Cleared buffer
[14:34:18.083][D][number:025]: ‘Max Amps’ >> 11.00
[14:34:20.015][D][sensor:118]: ‘Uptime Sensor’ >> 76 s
[14:34:20.444][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:34:20.444][W][emh1_modbus:173]: Query Status Report
[14:34:20.455][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:34:20.467][D][emh1_modbus:123]: Receiving 10 bytes
[14:34:20.467][I][abl_emh1:075]: Status frame received
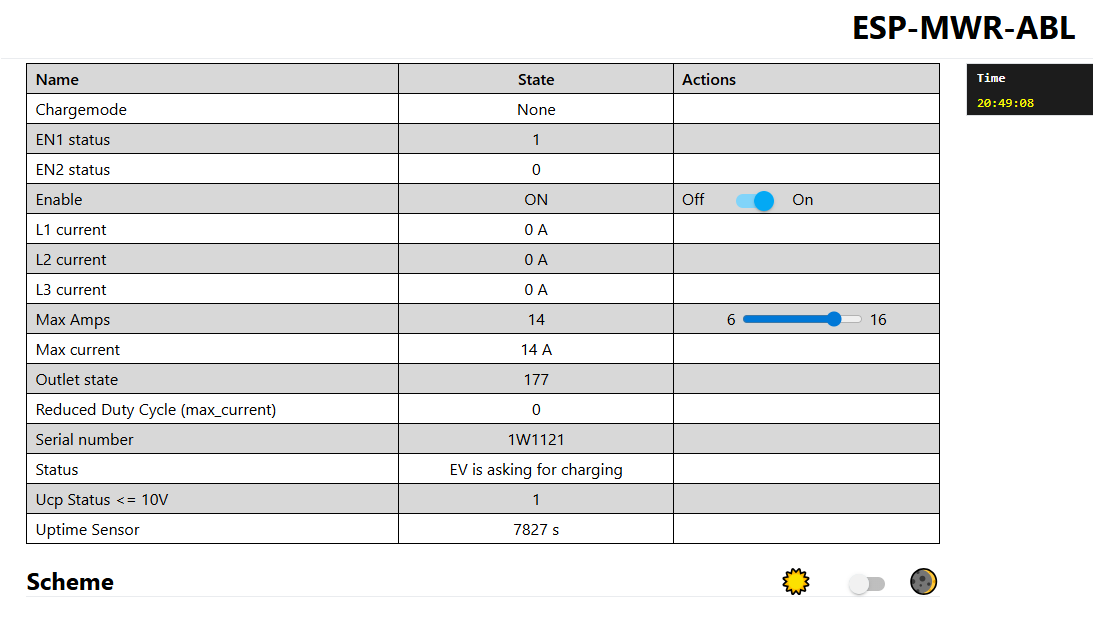
[14:34:20.468][D][sensor:118]: ‘Outlet state’ >> 177
[14:34:20.479][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:34:20.479][D][sensor:118]: ‘EN1 status’ >> 1
[14:34:20.491][D][sensor:118]: ‘EN2 status’ >> 0
[14:34:20.491][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:34:20.491][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:34:20.503][D][sensor:118]: ‘L1 current’ >> 0 A
[14:34:20.503][D][sensor:118]: ‘L2 current’ >> 0 A
[14:34:20.516][D][sensor:118]: ‘L3 current’ >> 0 A
[14:34:20.516][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:34:20.516][D][sensor:118]: ‘Max current’ >> 11 A
[14:34:20.522][D][emh1_modbus:156]: Cleared buffer
[14:34:25.444][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:34:25.444][W][emh1_modbus:173]: Query Status Report
[14:34:25.456][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:34:25.474][D][emh1_modbus:123]: Receiving 10 bytes
[14:34:25.474][I][abl_emh1:075]: Status frame received
[14:34:25.474][D][sensor:118]: ‘Outlet state’ >> 177
[14:34:25.496][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:34:25.496][D][sensor:118]: ‘EN1 status’ >> 1
[14:34:25.496][D][sensor:118]: ‘EN2 status’ >> 0
[14:34:25.496][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:34:25.507][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:34:25.507][D][sensor:118]: ‘L1 current’ >> 0 A
[14:34:25.507][D][sensor:118]: ‘L2 current’ >> 0 A
[14:34:25.518][D][sensor:118]: ‘L3 current’ >> 0 A
[14:34:25.518][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:34:25.531][D][sensor:118]: ‘Max current’ >> 11 A
[14:34:25.531][D][emh1_modbus:156]: Cleared buffer
[14:34:28.564][D][number:025]: ‘Max Amps’ >> 11.00
[14:34:30.072][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:34:30.472][W][emh1_modbus:173]: Query Status Report
[14:34:30.472][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:34:30.483][D][emh1_modbus:123]: Receiving 10 bytes
[14:34:30.483][I][abl_emh1:075]: Status frame received
[14:34:30.483][D][sensor:118]: ‘Outlet state’ >> 177
[14:34:30.483][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:34:30.483][D][sensor:118]: ‘EN1 status’ >> 1
[14:34:30.495][D][sensor:118]: ‘EN2 status’ >> 0
[14:34:30.495][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:34:30.495][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:34:30.508][D][sensor:118]: ‘L1 current’ >> 0 A
[14:34:30.509][D][sensor:118]: ‘L2 current’ >> 0 A
[14:34:30.522][D][sensor:118]: ‘L3 current’ >> 0 A
[14:34:30.522][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:34:30.522][D][sensor:118]: ‘Max current’ >> 11 A
[14:34:30.527][D][emh1_modbus:156]: Cleared buffer
[14:34:34.807][D][sensor:118]: ‘Uptime Sensor’ >> 91 s
[14:34:35.188][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:34:35.443][W][emh1_modbus:173]: Query Status Report
[14:34:35.443][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:34:35.471][D][emh1_modbus:123]: Receiving 10 bytes
[14:34:35.471][I][abl_emh1:075]: Status frame received
[14:34:35.491][D][sensor:118]: ‘Outlet state’ >> 177
[14:34:35.491][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:34:35.491][D][sensor:118]: ‘EN1 status’ >> 1
[14:34:35.491][D][sensor:118]: ‘EN2 status’ >> 0
[14:34:35.491][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:34:35.515][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:34:35.515][D][sensor:118]: ‘L1 current’ >> 0 A
[14:34:35.515][D][sensor:118]: ‘L2 current’ >> 0 A
[14:34:35.522][D][sensor:118]: ‘L3 current’ >> 0 A
[14:34:35.522][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:34:35.522][D][sensor:118]: ‘Max current’ >> 11 A
[14:34:35.522][D][emh1_modbus:156]: Cleared buffer
[14:34:38.213][D][number:025]: ‘Max Amps’ >> 11.00
[14:34:40.238][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:34:40.444][W][emh1_modbus:173]: Query Status Report
[14:34:40.455][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:34:40.477][D][emh1_modbus:123]: Receiving 10 bytes
[14:34:40.494][I][abl_emh1:075]: Status frame received
[14:34:40.494][D][sensor:118]: ‘Outlet state’ >> 177
[14:34:40.494][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:34:40.494][D][sensor:118]: ‘EN1 status’ >> 1
[14:34:40.494][D][sensor:118]: ‘EN2 status’ >> 0
[14:34:40.494][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:34:40.507][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:34:40.507][D][sensor:118]: ‘L1 current’ >> 0 A
[14:34:40.507][D][sensor:118]: ‘L2 current’ >> 0 A
[14:34:40.534][D][sensor:118]: ‘L3 current’ >> 0 A
[14:34:40.535][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:34:40.550][D][sensor:118]: ‘Max current’ >> 11 A
[14:34:40.550][D][emh1_modbus:156]: Cleared buffer
[14:34:45.263][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:34:45.445][W][emh1_modbus:173]: Query Status Report
[14:34:45.455][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:34:45.471][D][emh1_modbus:123]: Receiving 10 bytes
[14:34:45.471][I][abl_emh1:075]: Status frame received
[14:34:45.471][D][sensor:118]: ‘Outlet state’ >> 177
[14:34:45.482][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:34:45.482][D][sensor:118]: ‘EN1 status’ >> 1
[14:34:45.493][D][sensor:118]: ‘EN2 status’ >> 0
[14:34:45.493][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:34:45.494][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:34:45.512][D][sensor:118]: ‘L1 current’ >> 0 A
[14:34:45.512][D][sensor:118]: ‘L2 current’ >> 0 A
[14:34:45.512][D][sensor:118]: ‘L3 current’ >> 0 A
[14:34:45.527][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:34:45.527][D][sensor:118]: ‘Max current’ >> 11 A
[14:34:45.527][D][emh1_modbus:156]: Cleared buffer
[14:34:48.363][D][number:025]: ‘Max Amps’ >> 11.00
[14:34:49.807][D][sensor:118]: ‘Uptime Sensor’ >> 106 s
[14:34:50.388][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:34:50.444][W][emh1_modbus:173]: Query Status Report
[14:34:50.444][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:34:50.470][D][emh1_modbus:123]: Receiving 10 bytes
[14:34:50.470][I][abl_emh1:075]: Status frame received
[14:34:50.480][D][sensor:118]: ‘Outlet state’ >> 177
[14:34:50.480][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:34:50.480][D][sensor:118]: ‘EN1 status’ >> 1
[14:34:50.492][D][sensor:118]: ‘EN2 status’ >> 0
[14:34:50.492][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:34:50.504][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:34:50.504][D][sensor:118]: ‘L1 current’ >> 0 A
[14:34:50.504][D][sensor:118]: ‘L2 current’ >> 0 A
[14:34:50.518][D][sensor:118]: ‘L3 current’ >> 0 A
[14:34:50.518][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:34:50.518][D][sensor:118]: ‘Max current’ >> 11 A
[14:34:50.524][D][emh1_modbus:156]: Cleared buffer
[14:34:55.446][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:34:55.446][W][emh1_modbus:173]: Query Status Report
[14:34:55.446][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:34:55.466][D][emh1_modbus:123]: Receiving 10 bytes
[14:34:55.466][I][abl_emh1:075]: Status frame received
[14:34:55.479][D][sensor:118]: ‘Outlet state’ >> 177
[14:34:55.480][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:34:55.480][D][sensor:118]: ‘EN1 status’ >> 1
[14:34:55.501][D][sensor:118]: ‘EN2 status’ >> 0
[14:34:55.501][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:34:55.501][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:34:55.501][D][sensor:118]: ‘L1 current’ >> 0 A
[14:34:55.501][D][sensor:118]: ‘L2 current’ >> 0 A
[14:34:55.511][D][sensor:118]: ‘L3 current’ >> 0 A
[14:34:55.511][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:34:55.524][D][sensor:118]: ‘Max current’ >> 11 A
[14:34:55.524][D][emh1_modbus:156]: Cleared buffer
[14:34:58.512][D][number:025]: ‘Max Amps’ >> 11.00
[14:35:00.444][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:35:00.444][W][emh1_modbus:173]: Query Status Report
[14:35:00.456][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:35:00.474][D][emh1_modbus:123]: Receiving 10 bytes
[14:35:00.485][I][abl_emh1:075]: Status frame received
[14:35:00.485][D][sensor:118]: ‘Outlet state’ >> 177
[14:35:00.485][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:35:00.485][D][sensor:118]: ‘EN1 status’ >> 1
[14:35:00.496][D][sensor:118]: ‘EN2 status’ >> 0
[14:35:00.496][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:35:00.507][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:35:00.508][D][sensor:118]: ‘L1 current’ >> 0 A
[14:35:00.508][D][sensor:118]: ‘L2 current’ >> 0 A
[14:35:00.522][D][sensor:118]: ‘L3 current’ >> 0 A
[14:35:00.522][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:35:00.522][D][sensor:118]: ‘Max current’ >> 11 A
[14:35:00.529][D][emh1_modbus:156]: Cleared buffer
[14:35:05.098][D][sensor:118]: ‘Uptime Sensor’ >> 121 s
[14:35:05.098][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:35:05.459][W][emh1_modbus:173]: Query Status Report
[14:35:05.459][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:35:05.478][D][emh1_modbus:123]: Receiving 10 bytes
[14:35:05.478][I][abl_emh1:075]: Status frame received
[14:35:05.479][D][sensor:118]: ‘Outlet state’ >> 177
[14:35:05.479][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:35:05.485][D][sensor:118]: ‘EN1 status’ >> 1
[14:35:05.485][D][sensor:118]: ‘EN2 status’ >> 0
[14:35:05.485][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:35:05.497][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:35:05.497][D][sensor:118]: ‘L1 current’ >> 0 A
[14:35:05.511][D][sensor:118]: ‘L2 current’ >> 0 A
[14:35:05.511][D][sensor:118]: ‘L3 current’ >> 0 A
[14:35:05.511][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:35:05.529][D][sensor:118]: ‘Max current’ >> 11 A
[14:35:05.529][D][emh1_modbus:156]: Cleared buffer
[14:35:08.093][D][number:025]: ‘Max Amps’ >> 11.00
[14:35:10.212][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:35:10.445][W][emh1_modbus:173]: Query Status Report
[14:35:10.445][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:35:10.461][D][emh1_modbus:123]: Receiving 10 bytes
[14:35:10.461][I][abl_emh1:075]: Status frame received
[14:35:10.473][D][sensor:118]: ‘Outlet state’ >> 177
[14:35:10.473][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:35:10.512][D][sensor:118]: ‘EN1 status’ >> 1
[14:35:10.512][D][sensor:118]: ‘EN2 status’ >> 0
[14:35:10.512][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:35:10.526][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:35:10.526][D][sensor:118]: ‘L1 current’ >> 0 A
[14:35:10.526][D][sensor:118]: ‘L2 current’ >> 0 A
[14:35:10.526][D][sensor:118]: ‘L3 current’ >> 0 A
[14:35:10.526][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:35:10.526][D][sensor:118]: ‘Max current’ >> 11 A
[14:35:10.526][D][emh1_modbus:156]: Cleared buffer
[14:35:15.237][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:35:15.447][W][emh1_modbus:173]: Query Status Report
[14:35:15.447][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:35:15.466][D][emh1_modbus:123]: Receiving 10 bytes
[14:35:15.466][I][abl_emh1:075]: Status frame received
[14:35:15.479][D][sensor:118]: ‘Outlet state’ >> 177
[14:35:15.479][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:35:15.479][D][sensor:118]: ‘EN1 status’ >> 1
[14:35:15.489][D][sensor:118]: ‘EN2 status’ >> 0
[14:35:15.489][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:35:15.543][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:35:15.543][D][sensor:118]: ‘L1 current’ >> 0 A
[14:35:15.543][D][sensor:118]: ‘L2 current’ >> 0 A
[14:35:15.549][D][sensor:118]: ‘L3 current’ >> 0 A
[14:35:15.549][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:35:15.549][D][sensor:118]: ‘Max current’ >> 11 A
[14:35:15.549][D][emh1_modbus:156]: Cleared buffer
[14:35:18.261][D][number:025]: ‘Max Amps’ >> 11.00
[14:35:19.886][D][sensor:118]: ‘Uptime Sensor’ >> 136 s
[14:35:20.411][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:35:20.446][W][emh1_modbus:173]: Query Status Report
[14:35:20.460][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:35:20.472][D][emh1_modbus:123]: Receiving 10 bytes
[14:35:20.472][I][abl_emh1:075]: Status frame received
[14:35:20.472][D][sensor:118]: ‘Outlet state’ >> 177
[14:35:20.487][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:35:20.487][D][sensor:118]: ‘EN1 status’ >> 1
[14:35:20.497][D][sensor:118]: ‘EN2 status’ >> 0
[14:35:20.498][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:35:20.498][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:35:20.507][D][sensor:118]: ‘L1 current’ >> 0 A
[14:35:20.507][D][sensor:118]: ‘L2 current’ >> 0 A
[14:35:20.508][D][sensor:118]: ‘L3 current’ >> 0 A
[14:35:20.553][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:35:20.553][D][sensor:118]: ‘Max current’ >> 11 A
[14:35:20.553][D][emh1_modbus:156]: Cleared buffer
[14:35:25.447][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:35:25.447][W][emh1_modbus:173]: Query Status Report
[14:35:25.456][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:35:25.473][D][emh1_modbus:123]: Receiving 10 bytes
[14:35:25.486][I][abl_emh1:075]: Status frame received
[14:35:25.487][D][sensor:118]: ‘Outlet state’ >> 177
[14:35:25.487][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:35:25.487][D][sensor:118]: ‘EN1 status’ >> 1
[14:35:25.496][D][sensor:118]: ‘EN2 status’ >> 0
[14:35:25.496][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:35:25.508][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:35:25.508][D][sensor:118]: ‘L1 current’ >> 0 A
[14:35:25.508][D][sensor:118]: ‘L2 current’ >> 0 A
[14:35:25.528][D][sensor:118]: ‘L3 current’ >> 0 A
[14:35:25.528][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:35:25.528][D][sensor:118]: ‘Max current’ >> 11 A
[14:35:25.536][D][emh1_modbus:156]: Cleared buffer
[14:35:28.510][D][number:025]: ‘Max Amps’ >> 11.00
[14:35:30.088][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:35:30.471][W][emh1_modbus:173]: Query Status Report
[14:35:30.472][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:35:30.487][D][emh1_modbus:123]: Receiving 10 bytes
[14:35:30.487][I][abl_emh1:075]: Status frame received
[14:35:30.487][D][sensor:118]: ‘Outlet state’ >> 177
[14:35:30.487][D][text_sensor:113]: ‘Status’ >> ‘EV is asking for charging’
[14:35:30.487][D][sensor:118]: ‘EN1 status’ >> 1
[14:35:30.487][D][sensor:118]: ‘EN2 status’ >> 0
[14:35:30.499][D][sensor:118]: ‘Reduced Duty Cycle (max_current)’ >> 0
[14:35:30.499][D][sensor:118]: ‘Ucp Status <= 10V’ >> 1
[14:35:30.509][D][sensor:118]: ‘L1 current’ >> 0 A
[14:35:30.509][D][sensor:118]: ‘L2 current’ >> 0 A
[14:35:30.509][D][sensor:118]: ‘L3 current’ >> 0 A
[14:35:30.522][D][abl_emh1:106]: Read max current value 0x00 0xB7
[14:35:30.522][D][sensor:118]: ‘Max current’ >> 11 A
[14:35:30.522][D][emh1_modbus:156]: Cleared buffer
[14:35:34.816][D][sensor:118]: ‘Uptime Sensor’ >> 151 s
[14:35:35.135][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:35:35.450][W][emh1_modbus:173]: Query Status Report
[14:35:35.451][D][emh1_modbus:283]: TX → :0103002E0005C9
[14:35:35.662][W][emh1_modbus:092]: LRC check failed, discarding transmission
[14:35:38.185][D][number:025]: ‘Max Amps’ >> 11.00
[14:35:40.084][D][text_sensor:113]: ‘Chargemode’ >> ‘None’
[14:35:40.476][W][emh1_modbus:173]: Query Status Report
[14:35:40.476][D][emh1_modbus:283]: TX → :0103002E0005C9
##################################################
Outlet changed from 166 to 177
I think, there is just a missing bit like enable charing.
Martin