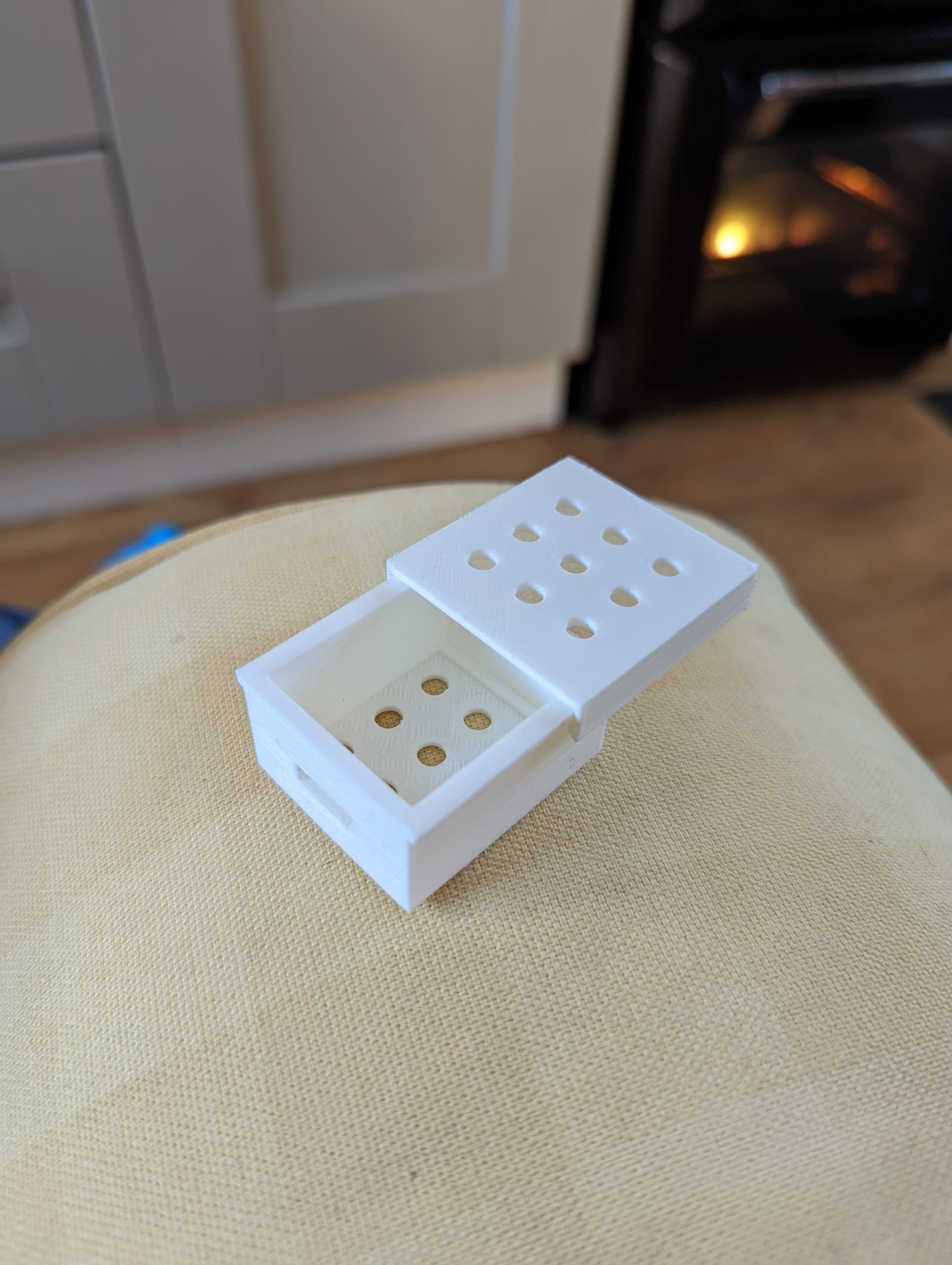
Holes are vital. It’s how the WiFi and radar particles can get out of the box 
2 Likes
I nearly went the same way as you. I’ve modified the box for mine now and it works nicely.

I need to make one more tweak and then I’ll be completely happy.
I need to make one more tweak and then I’ll be completely happy.
You mean design the HA logo into the top; am i right!?
2 Likes
Hold my beer…
4 Likes
Maybe you could get faster turn off times and have multi-zone detection by restarting the sensor. I believe the sensor calibrates at the beginning so that might cause it to not work. Maybe you could have zones say 0-3m 3-6m 6-9m to figure out which room or part of a larger space someone is in  the other sensor you mentioned is probably better for that sorta thing but I can’t quite justify $120~ Canadian for the best one.
the other sensor you mentioned is probably better for that sorta thing but I can’t quite justify $120~ Canadian for the best one.
Probably won’t try it but am curious.
And just so people know, the sensor does broadcast state over serial!
With a custom component or a yaml implementation & the DFRobot library you could save a pin if you cared.
If you try to return to digikey and it’s reasonable they just say here’s your money. Throw the thing out pls. At least when I did at one point for something worth ~$50

Haha, looks great!
1 Like
I haven’t tried the distance segments. Didn’t have a usecase for them. I think most of us struggle with the custom cpp.
Hallo everybody,
I followed this thread for quite a while, and today finally soldered everything together. Everything works if I only solder V, G and IO2. But if I solder TX and RX no motion is detected any more and the red led stops blinking and is constantly on. Even if I don’t change anything on the software side. Did I miss something?
Have you tried running it in the case for a longer period yet? I’ve only really tested it unboxed next to me on the desk where it was pretty reliable. Since I’ve boxed it up and moved it onto the living room TV stand it’s been MUCH less reliable… pretty useless at the moment actually.
I know there’s a certain degree of getting timeout and distance correct so hopefully I can get those dialled in soon. I’ll try and make sure it’s got a good field of view of the living room too (rather than a bit tucked away) and will maybe crank the distance up from the 800cm it’s currently at (the room is a lot smaller than this!). It’s mostly just not picking anything up unless pretty close and within its immediate-ish view.
I’m having a conversation with someone about orientation. One way gives 100 X 40. The other 40 X 100. Logic is saying that 2 rows X 3 columns will be 100 X 40 and 3 rows X 2 columns is the opposite.
The wiki didn’t make it clear.
Anyone say for sure?
I had it set up cased and with only IO2 soldered for a week, and it was working very good. But I had a few sitting positions were I needed more than the default 3 m distance. So I soldered the uart pins. But the moment they are soldered, there is no motion detected any more.
Do you have any metal surfaces in the nearby?
I have IO2 and TX/RX soldered without issue. The board does still detect me when I’m very close to it pretty reliably. I’m just finding it’s not great if I’m the other side of the room, even if I have it set to 8m in a 5m long room.
Nothing large and metal nearby mine, TV, Chromecast and Xbox all nearby though possibly causing some interference.
Hm, strange. Then there is probably something wrong with my soldering. I have problem with reliability for more than 3 m.
Did you try it with a bigger difference from the electric equipment?
Edit: My uart gives some funny log. Is than normal?
[17:27:59][D][uart_debug:158]: <<< “$JYBSS,1, , , *\r\n”
That’s normal. The first number says whether there is presence or not. 1=occupied
Ah thank you! I fear I fried one of my boards. It only detects movement if it is 5 cm away and that one second delayed. The uart settings have no effect on this one board. Anyone else having this problem?
I’ve also got the DFRobot one setup - thanks for the config!
I’m wondering in which orientation the beam is - looking at the wiki I can’t tell from their pictures.
Initially I thought that having it with the pads 3 wide 2 high would have the 140 degree beam horizontal, but in testing it feels like it’s the other way around as it wasn’t quite making it to the edges of the room. Certainly many of the pictures above have it mounted 3 high 2 wide.
Any ideas?

Good question. Would need a decent sized room to really test I would think.
Other mmWave datasheets have radiation emission charts. Sadly not the DFRobot. No harm though if you can spend some time tuning placement. This is where a very short cooldown latency is helpful.