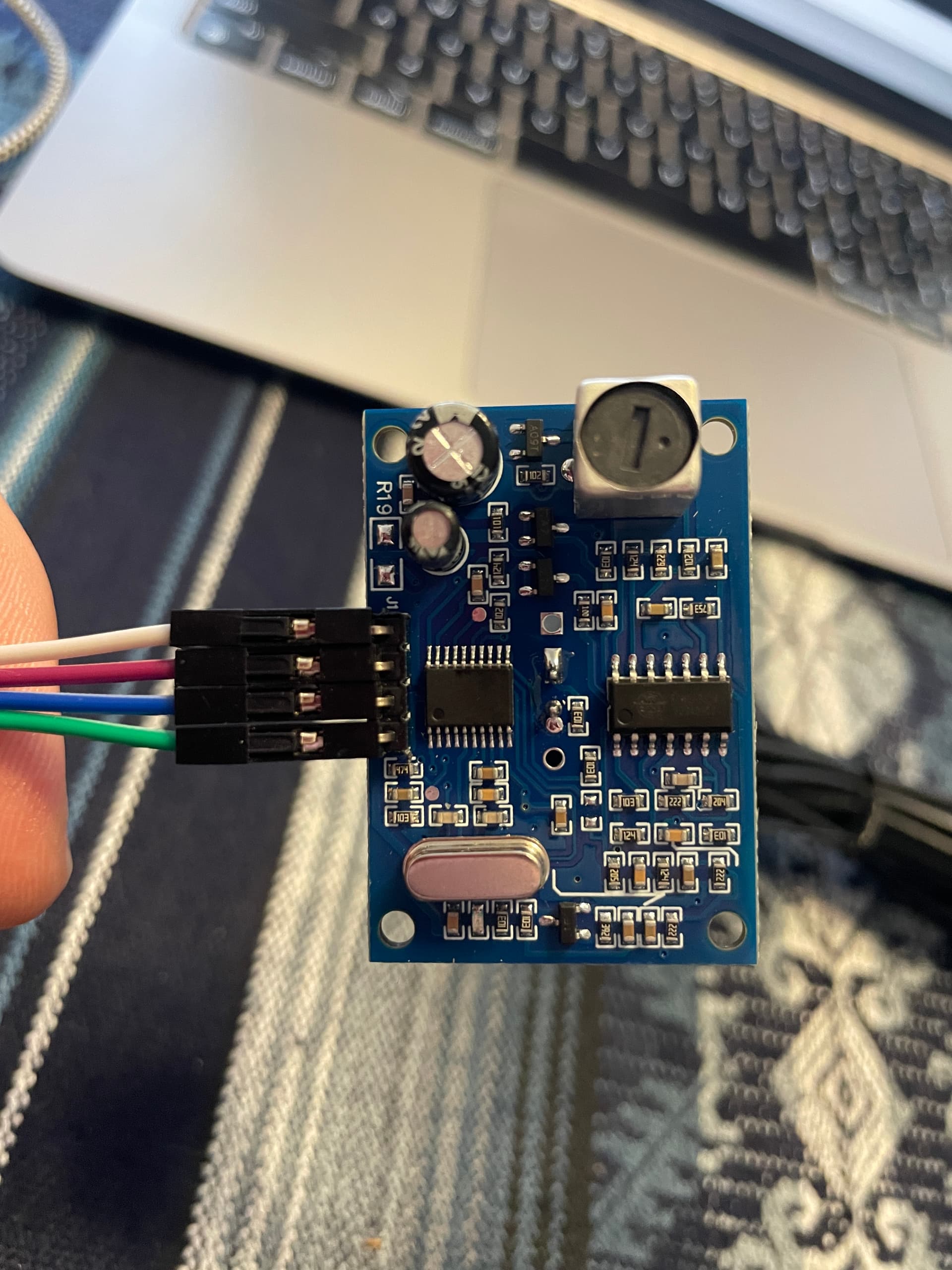
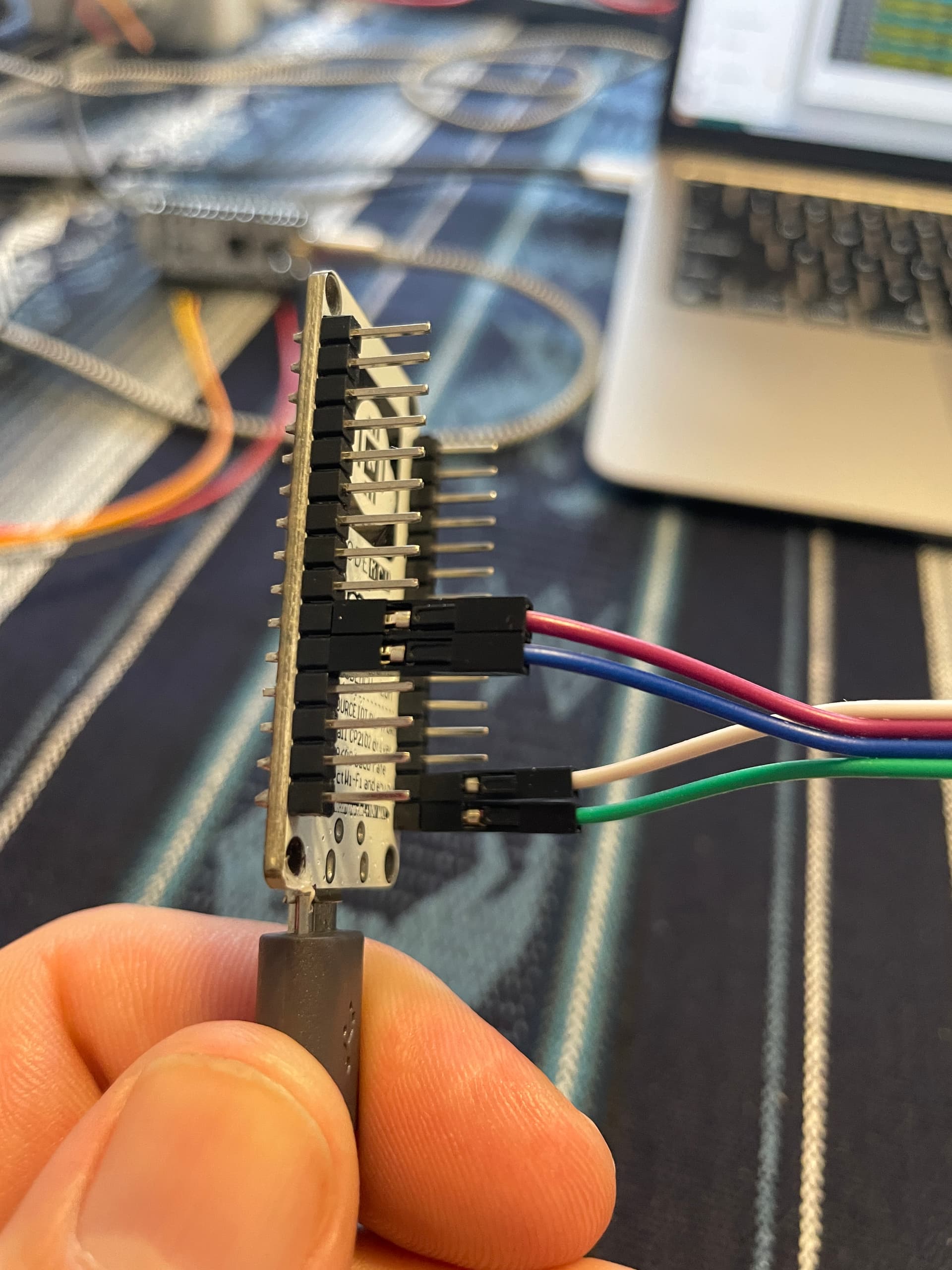
I am running the AJ-SR04M, which is sold on Amazon as the JSN-SR04t on a NodeMCU 1.0 (ESP8266). I was able to confirm that the sensor and the board were working AND I had the correct pins by uploading a simple example through Arduino IDE. I didn’t notice any mention of the specific timeout, but this helped. Here is my full ESPHome yaml:
Here are a few pictures of the wiring. I’m not sure if GPIO pins 13 and 15 must be used or whether I could use 12 and 14 or even 4 and 5, there are mixed comments on these elsewhere, but I may try them each later.
I feel a bit bad after starting this thread and not coming to you for quite a while. But at least it looks like I was not the only struggling and some got helped. After tinkering around this afternoon (and finishing some really nice projects while not finding the time to tackle this), it is finally working. This is my final sensor setup:
Well, if I say working: I still have quite a few timed outs, that is why I added the filters. It looks to me that I got a bunch of crappy sensors which are not working well.