Have a 6 series roomba which didn’t have wifi support. Having HA wanted to implement a smarter solution - start when nobdy is home. Well simply said it was easier than i thought. All is needed - a buck converter
like this Aliexpress
And a wemos d1 mini which is an esp 8266 development board.
Need to solder only 6 wires.
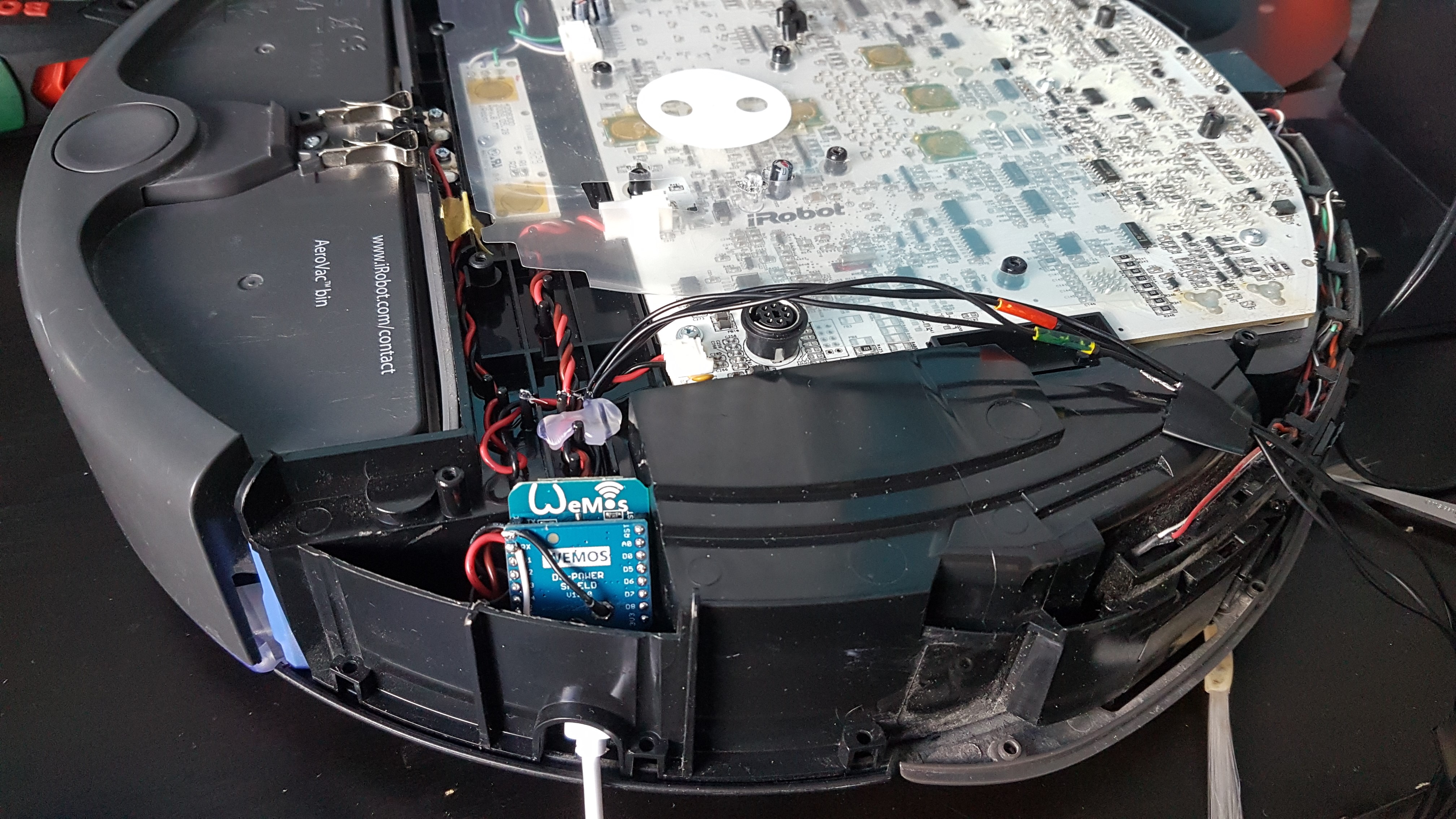
From what i have seen on the internet - this adaptation always had several boards stuck out of the case or an ugly overhead construction. Really don’t understand why. Just use cat5 wire dor wiring and stick it into the din slot. And the buck and wifi board go to the niche near the wheel (do not disconnect the power socket from there. Just leave it there) The cover fits nicely like it was there
The only problem - all i could find for the code was github below. And although it is ok - has only 2 commands (clean and dock). So if anybody has a better code or knows off an interesting project which also proveides sensor readings - please share
I used to have a roowifi until it broke (definately to do with sitting on top of the roomba exposed!), so I might make one of these too.
You can see the commands in the git repo you linked here, as you mentioned only start and dock have been implemented.
The implemented structure looks to be [128], [131], [command], where 128 is a start code, 131 enables safe mode. The implemented commands are 135 for clean and 143 for dock.
The full SCI spec can be found here, you can find the commands there, it also gives you the spec for querying sensors.
The source code for roowifi also shows the implemented commands.
Just to give a rough idea. This was for fitting - nothing soldered yet
Thanks for the info. I was thinking of that but the code contains built in web server so will need to put more buttons. Hopefully this project will evolve and it will be a copy paste
Funny… I did exactly the same in April I didn’t want to see the Wemos on top of the Roomba
But I also just can use the functions start/stop/dock so far
Hi, I have a Roomba 555 and pilot through Broadlink RM PRO.
I do not always manage to return to the base because when I send the command is hidden behind a mobile, but no problem is going to start. Simple and easy.
Reading the current “sensor” gives an idea of its position or action - positive value = in dock, more than a use of 500mA(-500) signales movement, around -100mA active but not running.
I didn’t see your fork with the changes, so I did a fork with the changes made.
I’m little lost on adding the wakeup. Its pretty essential since the goal I had was to have roomba power back on when stuck and lost in the house. Seems to happen in same spots.
 I didn’t want to see the Wemos on top of the Roomba
I didn’t want to see the Wemos on top of the Roomba