deluc
October 31, 2020, 10:10am
1
Hey guys,
Thank you!
I think the first thing you need to do is capture the events from the sensor using Developer Tools - Events, enter “zha_event” and press “Start Listening” and you should see something like this:
You can then use this information in an automation trigger and conditions as per the example below:
alias: Aqara D1 Automation
description: Under test
trigger:
- event_data:
device_ieee: '00:15:8d:00:04:77:6a:37'
event_type: zha_event
platform: event
condition: []
action:
- choose:
- conditions:
- condition: template
value_template: '{{ trigger.event.data.command in [''left_single''] }}'
sequence:
- device_id: 5320c28c7c1e45c580aa9a5ad9bc4432
domain: light
entity_id: light.kitchen_lights
type: toggle
- conditions:
- condition: template
value_template: '{{ trigger.event.data.command in [''right_single''] }}'
sequence:
- device_id: 92c52b6d053e42e5a472e7b017c60032
domain: switch
entity_id: switch.sonoff03
type: toggle
- conditions:
- condition: template
value_template: '{{ trigger.event.data.command in [''left_double''] }}'
sequence:
- entity_id: input_select.kitchen_scenes
service: input_select.select_previous
- conditions:
- condition: template
value_template: '{{ trigger.event.data.command in [''right_double''] }}'
sequence:
- entity_id: input_select.kitchen_scenes
service: input_select.select_next
- conditions:
- condition: template
value_template: '{{ trigger.event.data.command in [''left_long press''] }}'
sequence:
- device_id: 5320c28c7c1e45c580aa9a5ad9bc4432
domain: light
entity_id: light.kitchen_lights
type: toggle
- conditions:
- condition: template
value_template: '{{ trigger.event.data.command in [''right_long press''] }}'
sequence:
- device_id: 92c52b6d053e42e5a472e7b017c60032
domain: switch
entity_id: switch.sonoff03
type: toggle
default: []
mode: queued
max: 3
I don’t have a vibration sensor so I could be wrong however there would be no harm trying the above.
1 Like
deluc
October 31, 2020, 6:27pm
4
@lonebaggie Do I need to have the Aqara bridge for this? Because I connected my vibration sensor directly to my conbee II.
@Jonah1970 Sadly nothing happens when listening to zha_event.
OK, sorry it did not help.
1 Like
Sorry yes my solution use the xiaomi hub
deluc
October 31, 2020, 9:32pm
7
I found someone who got it to work. He uses the y angle to trigger. But sadly he doesn’t respond.
This is his code, I tried to adapt it, but I failed. Anyone got an idea how to make it work?
- id: vacuumdustbinemptied
alias: Roborock Staubbehälter geleert
trigger:
- event_data:
data: /roborock-geleert
event_type: telegram_callback
platform: event
- below: '-25'
entity_id: sensor.vibration_sensor_roborock_action
for: 00:00:10
platform: numeric_state
value_template: '{{ state.attributes.angle_y}}'
- platform: tag
tag_id: roborock
condition:
- condition: and
conditions:
- condition: or
conditions:
- condition: state
entity_id: input_boolean.daily_vacuum_first_run
state: 'on'
- condition: numeric_state
entity_id: counter.reinigung
above: 0
- condition: state
entity_id: input_boolean.vacuum_dust_bin_emtpied
state: 'off'
action:
- data:
entity_id: input_boolean.vacuum_dust_bin_emtpied
service: homeassistant.turn_on
- data:
entity_id: counter.reinigung
service: counter.reset
- delay: 00:00:05
- data:
data:
type: announce
target:
- group.echo_notification
message: Hey, vielen Dank, dass du den Staubbehälter meines Kumpels Rocky geleert
hast.
service: notify.alexa_media
- data:
callback_query_id: '{{ trigger.event.data.id }}'
message: Alles klar :)
service: telegram_bot.answer_callback_query
- data:
chat_id: '{{ trigger.event.data.chat_id }}'
inline_keyboard: []
message_id: '{{ trigger.event.data.message.message_id }}'
service: telegram_bot.edit_replymarkup
deluc
November 7, 2020, 6:04pm
8
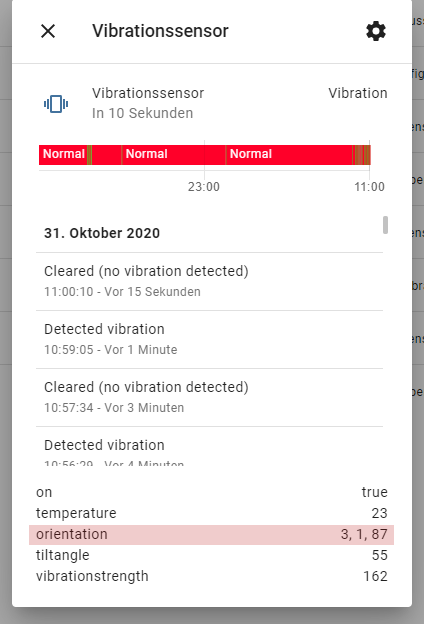
I added a sensor in my sensor.yaml. Now I get the three angles as own sensor.
# Angle Sensor Roborock
roborock_angle:
value_template: "{{ state_attr('binary_sensor.vibration_1', 'orientation')}}"
friendly_name: Angle Sensor Roborock
unit_of_measurement: '°'
1 Like
I guess you now have all 3 axes in one sensor value.
How would I proceed when I only want to monitor one specific Angel (like the y-axis e. g.)?