Couldn’t find this anywhere else…
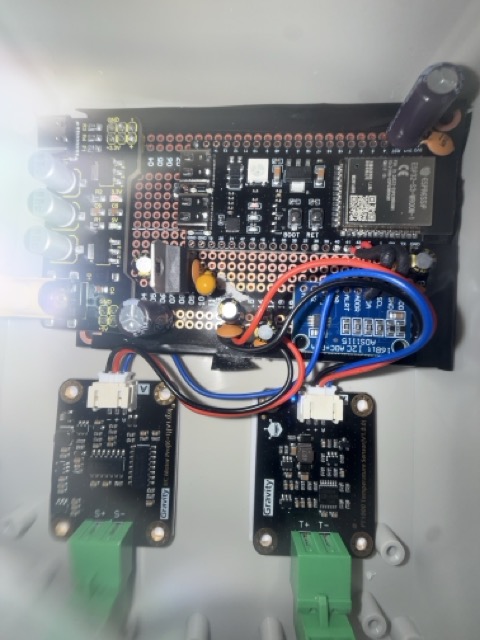
This is a working ESPHome config for the DFRobot Gravity: EC Sensor.
The EC side is accurate according to my testing ![]()
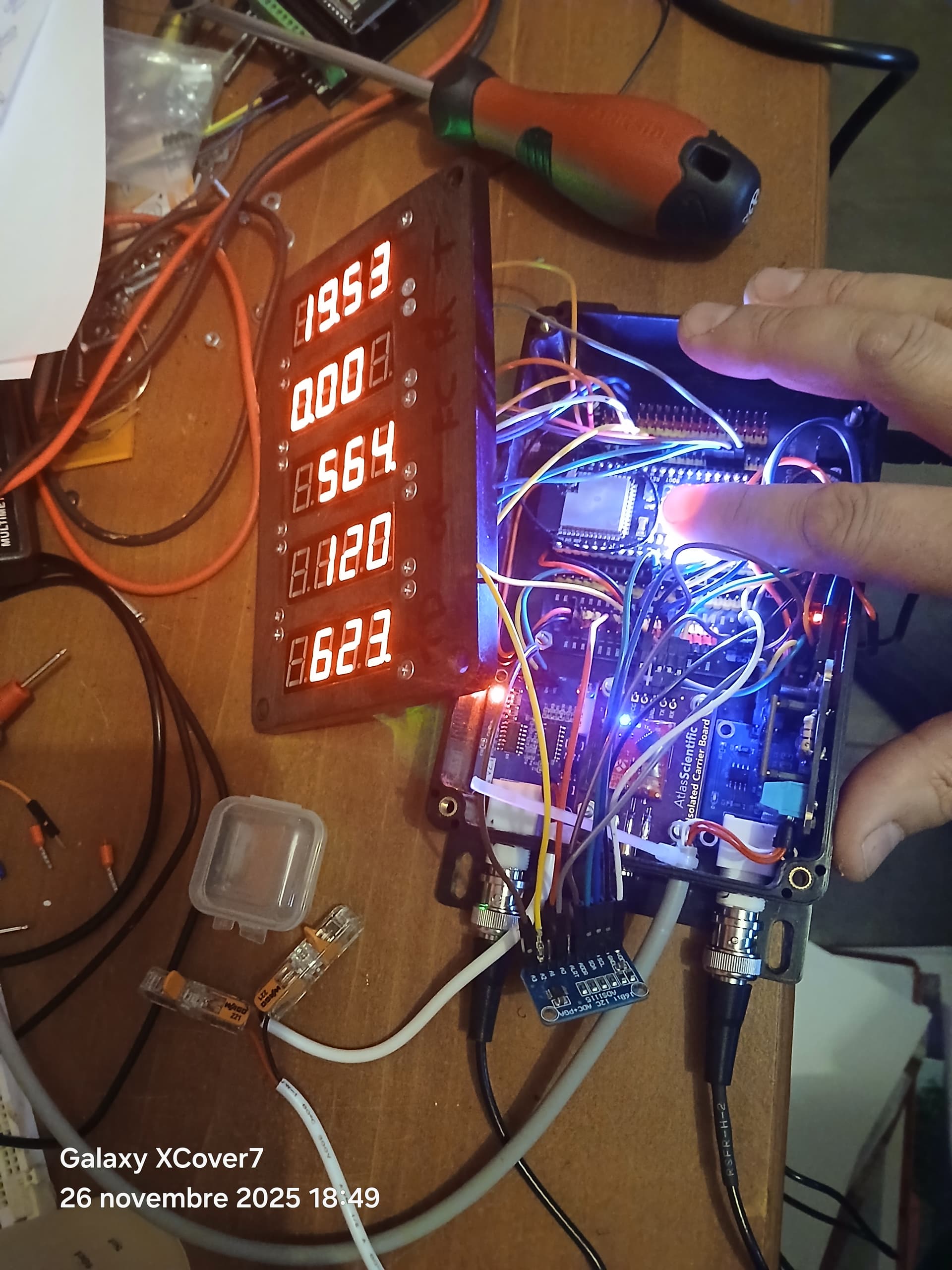
The Temp sensor has a fixed offset of -2.87 but can be manually calibrated. I still don’t think its quite right, as I get more reliable readings from other probes, but it’s ‘good enough’ for a reef tank with stable temp. If anyone can improve my temp sensor then please feel free to share!
Hope this helps the next person as I struggled to get this to work!
edit: got given the wrong source code which didn’t help! - Temp sensor much better now!
edit, edit: added one point calibration from a 53,000 µS/cm reference solution. The 1413 µS/cm solution supplied with this probe just increases the error range for this application. This will automagically adjust the cal_slope to calibrate the probe, whilst leaving cal_offset at 0.
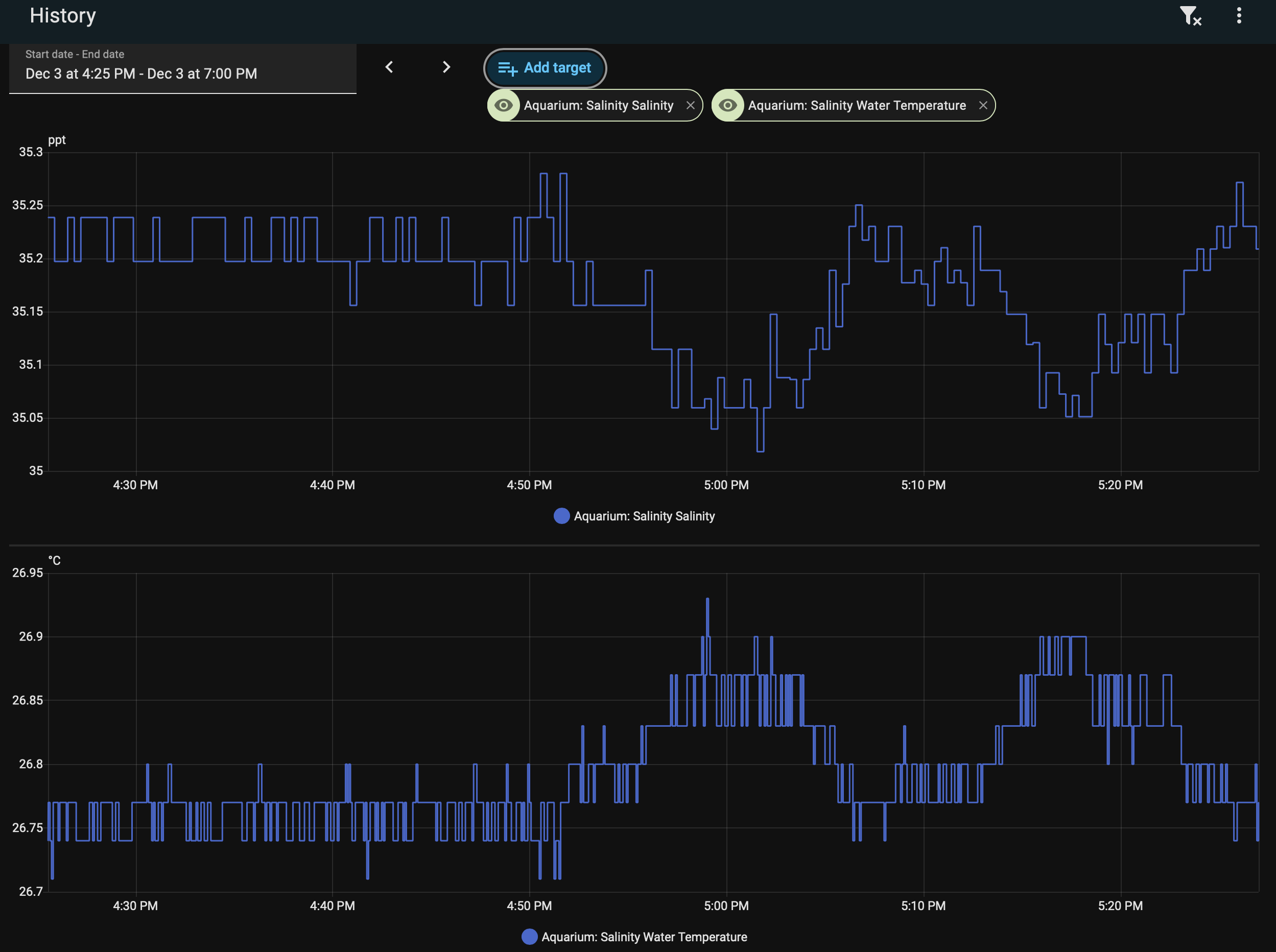
edit, edit, edit: Realised that I’d been calibrating against the value reported by Hanna which hadn’t been calibrated in a long time… added a sensor so I can get a reminder after sixty days to run the calibration. Everything now updates after 1 sec from a button press, but data isn’t reported for 5 sec to reduce network activity. I still think my other probes return a more consistent temperature reading so I’m using node-red to redo the salinity conversion, but the EC side seems solid!
# I2C configuration for ADS1115
i2c:
sda: GPIO8 # Change to your preferred SDA pin
scl: GPIO9 # Change to your preferred SCL pin
scan: true
frequency: 400kHz
# ADS1115 configuration
ads1115:
- address: 0x48 # Default I2C address
id: ads1115_hub
# Global variables for calibration
globals:
- id: calibration_mode
type: bool
initial_value: 'false'
- id: cal_voltage_low
type: float
initial_value: '0.0'
- id: cal_voltage_high
type: float
initial_value: '0.0'
- id: last_calibration_time
type: uint32_t
initial_value: '0'
# Persistent storage for calibration parameters - MUST be defined before sensors
number:
- platform: template
name: "EC Calibration Slope"
id: cal_slope
entity_category: config
min_value: 0.1
max_value: 100.0
initial_value: 15.68
step: 0.001
optimistic: true
restore_value: true
- platform: template
name: "EC Calibration Offset"
id: cal_offset
entity_category: config
min_value: -1000.0
max_value: 1000.0
initial_value: 0
step: 0.1
optimistic: true
restore_value: true
- platform: template
name: "Temperature Calibration Offset"
id: temp_cal_offset
entity_category: config
min_value: -10.0
max_value: 10.0
initial_value: -1.97 # Based on your measurement
step: 0.01
optimistic: true
restore_value: true
unit_of_measurement: "°C"
- platform: template
name: "Last Calibration Timestamp"
id: last_calibration_timestamp
entity_category: config
min_value: 0
max_value: 2147483647 # Max uint32_t value
initial_value: 0
step: 1
optimistic: true
restore_value: true # This is the key - persists across reboots
internal: true # Hide from HA UI
sensor:
# EC probe's integrated PT1000 temperature sensor via ADS1115
- platform: ads1115
ads1115_id: ads1115_hub
multiplexer: 'A1_GND' # PT1000 temperature sensor on A1
gain: 4.096 # ±4.096V range (good for PT1000 circuit)
name: "Temperature Voltage"
id: temp_voltage
update_interval: 5s
accuracy_decimals: 4
internal: false # Hide raw voltage reading
unit_of_measurement: "mV"
filters:
- multiply: 1000 # Convert to mV for consistency
- platform: template
name: "Water Temperature"
id: water_temp
unit_of_measurement: "°C"
device_class: "temperature"
state_class: "measurement"
accuracy_decimals: 2
update_interval: 5s
lambda: |-
float voltage_mV = id(temp_voltage).state;
// Convert mV to V for calculation (DFRobot formula expects volts)
float voltage = voltage_mV / 1000.0;
// DFRobot PT1000 conversion constants from source code
const float GDIFF = 30.0/1.8; // ~16.67
const float VR0 = 0.223;
const float G0 = 2.0;
const float I = 1.24 / 10000.0; // 0.000124
// Calculate PT1000 resistance using DFRobot formula
// Rpt1000 = (voltage/GDIFF + VR0) / I / G0
float Rpt1000 = (voltage/GDIFF + VR0) / I / G0;
// Convert resistance to temperature
// temp = (Rpt1000 - 1000) / 3.85
float temperature_raw = (Rpt1000 - 1000.0) / 3.85;
// Apply calibration offset
float temperature = temperature_raw + id(temp_cal_offset).state;
// Bounds checking and logging
if (temperature < 15.0 || temperature > 35.0) {
ESP_LOGW("temp_sensor", "Temperature out of expected range: %.2f°C (raw: %.2f°C, %.2f mV, %.2f Ω)",
temperature, temperature_raw, voltage_mV, Rpt1000);
} else {
ESP_LOGD("temp_sensor", "Temperature: %.2f°C (raw: %.2f°C, %.2f mV, %.2f Ω)",
temperature, temperature_raw, voltage_mV, Rpt1000);
}
return temperature;
# Voltage reading from EC sensor via ADS1115
- platform: ads1115
ads1115_id: ads1115_hub
multiplexer: 'A0_GND' # Single-ended input on A0
gain: 6.144 # ±6.144V range (adjust based on your sensor's output range)
name: "EC Voltage"
unit_of_measurement: "mV"
id: ec_voltage
update_interval: 5s
accuracy_decimals: 4
filters:
- multiply: 1000 # Convert to mV
- exponential_moving_average:
alpha: 0.0033
send_every: 10
internal: false # Hide from HA if you only want the final EC value
# EC Value calculated sensor
- platform: template
name: "EC Value"
id: ec_value
unit_of_measurement: "µS/cm"
device_class: "conductivity"
state_class: "measurement"
accuracy_decimals: 2
update_interval: 5s
filters:
- exponential_moving_average:
alpha: 0.0033
send_every: 10
lambda: |-
float voltage = id(ec_voltage).state;
float temperature = id(water_temp).state;
// Default temperature if sensor not available
if (isnan(temperature)) {
temperature = 24.5;
}
// EC calculation with temperature compensation using DFRobot algorithm
float ec_value = 0;
if (voltage > 0) {
// DFRobot EC calculation - this needs calibration with known standards
float k_value = id(cal_slope).state; // Calibration factor (default 1.0)
// Basic voltage to EC conversion
float raw_ec = (voltage / 1000.0) * k_value * 1000.0; // Convert mV to µS/cm
// Temperature compensation (2% per degree C from 25C)
float temp_coeff = 1.0 + 0.02 * (temperature - 25.0);
ec_value = raw_ec / temp_coeff;
// Apply calibrated offset if available
ec_value += id(cal_offset).state;
}
return ec_value;
# Salinity calculation from EC value - FIXED: Calculate directly from voltage
- platform: template
name: "Salinity (Instantaneous)"
id: salinity_instant
unit_of_measurement: "ppt"
state_class: "measurement"
accuracy_decimals: 2
update_interval: 10s
lambda: |-
// Calculate EC value directly in this lambda instead of referencing ec_value sensor
float voltage = id(ec_voltage).state;
float temperature = id(water_temp).state;
// Default temperature if sensor not available
if (isnan(temperature)) {
temperature = 25.0;
}
// EC calculation with temperature compensation
float ec_value = 0;
if (voltage > 0) {
float k_value = id(cal_slope).state;
float raw_ec = (voltage / 1000.0) * k_value * 1000.0;
float temp_coeff = 1.0 + 0.02 * (temperature - 25.0);
ec_value = raw_ec / temp_coeff;
ec_value += id(cal_offset).state;
}
if (ec_value <= 0 || isnan(ec_value)) {
return 0.0;
}
// Convert EC (µS/cm) to Salinity (ppt)
// For seawater: Salinity (ppt) ≈ EC (µS/cm) / 1450-1550 depending on composition
// For typical marine aquarium water: ~53,000 µS/cm = ~35 ppt
float salinity_ppt = ec_value / 1514.3; // Adjusted for 35ppt target
return salinity_ppt;
# Smoothed salinity reading (1-hour moving average) - FIXED: Reference salinity_instant properly
- platform: template
name: "Salinity (Smoothed)"
id: salinity_smoothed
unit_of_measurement: "ppt"
state_class: "measurement"
accuracy_decimals: 2
update_interval: 60s # Update every minute to reduce processing load
lambda: |-
static std::vector<float> readings;
static const int MAX_READINGS = 60; // 60 readings = 1 hour at 1-minute intervals
// Check if salinity_instant sensor has a valid state
if (!id(salinity_instant).has_state()) {
return {}; // Return empty optional if no state yet
}
float current_salinity = id(salinity_instant).state;
if (!isnan(current_salinity) && current_salinity > 0) {
readings.push_back(current_salinity);
// Keep only the last MAX_READINGS
if (readings.size() > MAX_READINGS) {
readings.erase(readings.begin());
}
// Calculate average
float sum = 0;
for (float reading : readings) {
sum += reading;
}
return sum / readings.size();
}
return current_salinity; // Return current reading if no history yet
- platform: template
name: "Days Since Last Calibration"
id: days_since_calibration
unit_of_measurement: "days"
device_class: "duration"
state_class: "measurement"
accuracy_decimals: 1
update_interval: 1h # Update every hour
lambda: |-
uint32_t last_cal_timestamp = (uint32_t)id(last_calibration_timestamp).state;
// If never calibrated, return a large number to indicate this
if (last_cal_timestamp == 0) {
return 999.9; // Indicates "never calibrated"
}
// Get current time from Home Assistant
auto time = id(homeassistant_time).now();
if (!time.is_valid()) {
ESP_LOGW("calibration", "Time not available from Home Assistant");
return {}; // Return empty optional if time not available
}
uint32_t current_timestamp = time.timestamp;
// Calculate time difference in seconds
uint32_t time_diff = current_timestamp - last_cal_timestamp;
// Convert to days (86400 seconds per day)
float days = time_diff / 86400.0;
return days;
# Add calibration to adjust cal_slope based on a reference sample
button:
- platform: template
name: "Calibrate EC to 53000 µS/cm"
id: calibrate_ec_button
entity_category: config
on_press:
- lambda: |-
float current_voltage = id(ec_voltage).state;
float current_temp = id(water_temp).state;
if (isnan(current_temp)) {
current_temp = 24.5;
}
const float target_ec = 53000.0;
if (current_voltage > 0) {
float current_slope = id(cal_slope).state;
float current_offset = id(cal_offset).state;
float temp_coeff = 1.0 + 0.02 * (current_temp - 25.0);
float new_slope = ((target_ec - current_offset) * temp_coeff) / current_voltage;
if (new_slope > 0.1 && new_slope < 100.0) {
auto call = id(cal_slope).make_call();
call.set_value(new_slope);
call.perform();
// Record calibration timestamp using Home Assistant time
auto time = id(homeassistant_time).now();
if (time.is_valid()) {
auto timestamp_call = id(last_calibration_timestamp).make_call();
timestamp_call.set_value((float)time.timestamp);
timestamp_call.perform();
ESP_LOGI("calibration", "Calibration timestamp saved: %u", time.timestamp);
} else {
ESP_LOGW("calibration", "Could not get current time for calibration timestamp");
}
// Force immediate update of the days sensor
id(days_since_calibration).update();
ESP_LOGI("calibration", "EC Calibration completed!");
ESP_LOGI("calibration", "Voltage: %.2f mV, Temperature: %.2f°C", current_voltage, current_temp);
ESP_LOGI("calibration", "New cal_slope: %.3f", new_slope);
ESP_LOGI("calibration", "Target EC: %.0f µS/cm", target_ec);
} else {
ESP_LOGE("calibration", "Calculated slope out of bounds: %.3f", new_slope);
}
} else {
ESP_LOGE("calibration", "Invalid voltage reading: %.2f mV", current_voltage);
}
- platform: restart
name: "Salinity Controller Restart"
icon: "mdi:restart"
# Text sensor to show calibration status
text_sensor:
- platform: template
name: "Calibration Status"
id: cal_status
lambda: |-
if (id(calibration_mode)) {
return {"Calibration Mode Active"};
} else {
return {"Normal Operation"};
}