Hi Guys
Recently got an ally and got it integrated in z2m and running in covered mode with external temp sensor. This ally is on the kitchen radiator and the thing is, the radiator is really poorly placed. it is basically behind the counters with a open port over it.
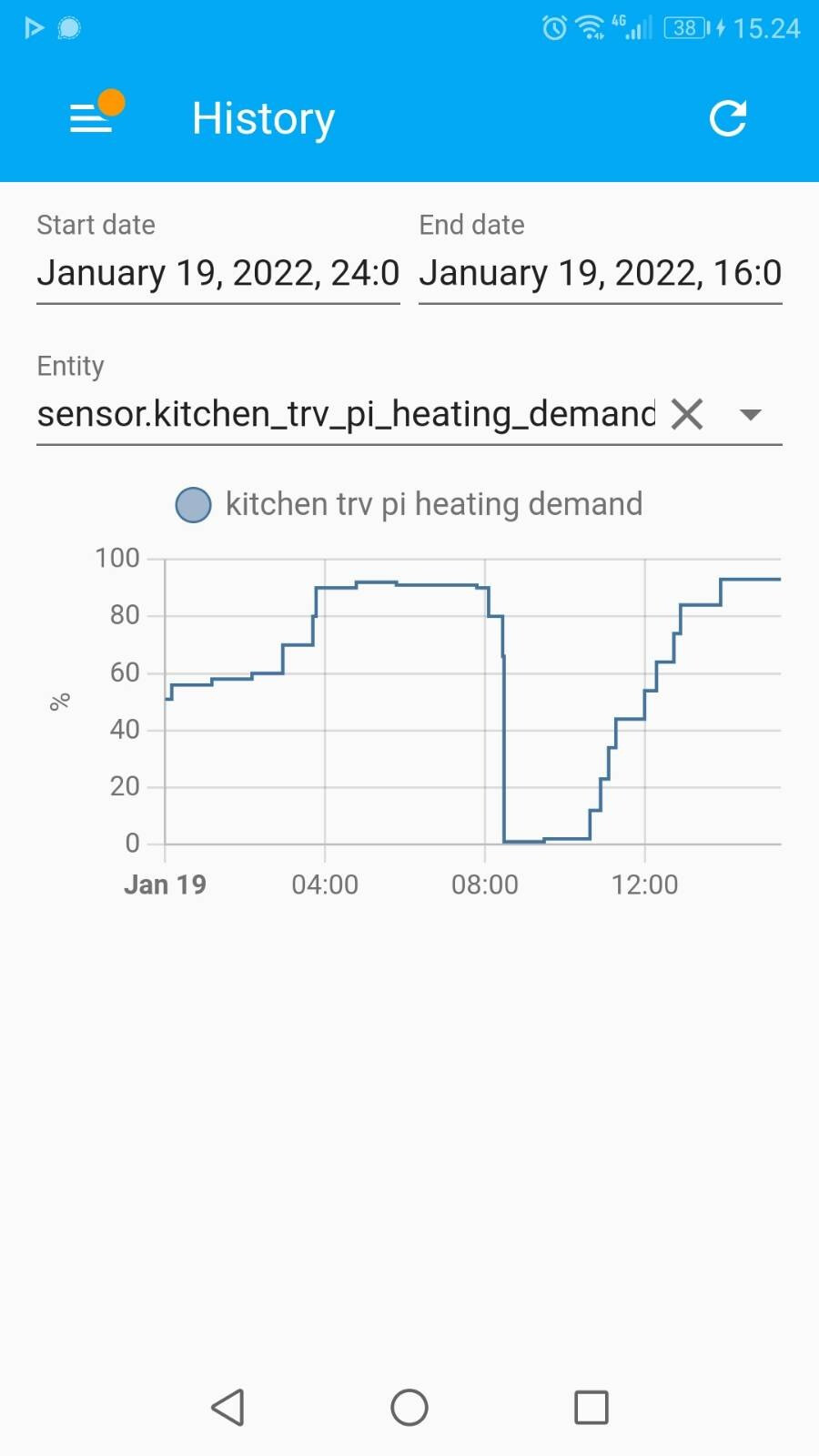
When the room load is more or less constant the ally is able to track the temperature setpoint pretty but it over/undershoots quite a lot and you can also see on the valve opening (picture)
what are you guys experience with the Adaptation run control, as I understand it, the ally will try to “learn” the room and thereby better know how to control the temperature
I’ve seen in other comments that in ZHA people have enabled Adaptation run control by sending commands to the zigbee cluster ID, is there an equivalent way to do this in z2m and do you guys believe it will help ?
Control algorithm scale factor = 5

Control algorithm scale factor = 3
temp response with scale factor = 3 and setpoint = 21
