This post is some info on the rj12 Bluetooth dongle port.
I’ve been able to decode the UART height messages coming from the controller to the dongle port (building on sseib’s work). They are similar to the ones on the rj45 port.
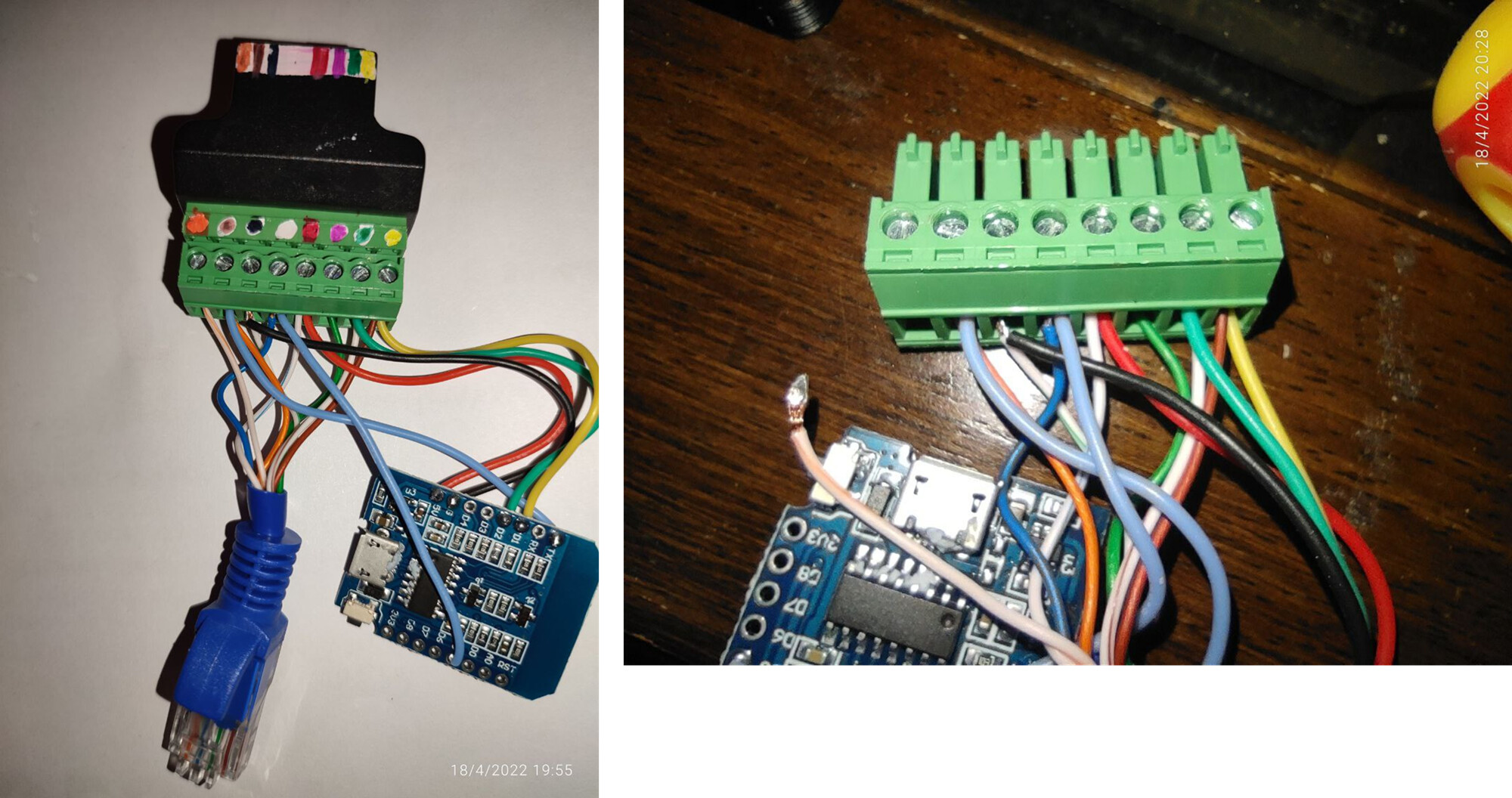
But there doesn’t appear to be dedicated wires for raising/lowering the desk on this port. You can see in the teardown link below that the Bluetooth dongle has 4 wires. Earth, power, tx and (very likely) rx. I asked the company for the protocol for controlling it but they would not provide it. And I don’t believe you can actually purchase the dongle to sniff commands coming from the dongle to the desk. Therefore there is no known way to control the desk over this port, only get height readings.
So I abandoned this port and went forward with my “pass-through” solution on the rj45 port.
But here is some consolidated info I have on the RJ12 port anyway.
The dongle:
https://en.jiecang.com/product/131.html
Someone else’s tear-down:
https://fccid.io/2ANKDJCP35NBLT/Internal-Photos/Internal-Photos-3727739
Jiecang, Desky, and Uplift apps on the Google play store give you some hints as to the commands possible.
https://www.upliftdesk.com/uplift-desk-connect/
This guy appears to have built something interesting:
To see messages coming from the bluetooth port youm can use this UART debugging config.
I’ve forgotten and lost the pin schema though unfortunately
uart:
- id: uart_bus2
tx_pin: GPIO17
rx_pin: GPIO16
baud_rate: 9600
debug:
direction: BOTH
dummy_receiver: true
after:
bytes: 9
sequence:
- lambda: UARTDebug::log_int(direction, bytes, ',');
Then desk height = ( byte 5 * 256 ) + byte 6
= (5*256) + 41 = 1321mm = 132.1cm
Sample messages:
[20:40:27][D][uart_debug:176]: <<< 242,242,1,3,3,63,15,85,126
[20:40:27][D][uart_debug:176]: <<< 242,242,1,3,3,56,15,78,126
[20:40:27][D][uart_debug:176]: <<< 242,242,1,3,3,48,15,70,126
[20:40:28][D][uart_debug:176]: <<< 242,242,1,3,3,42,15,64,126
[20:40:28][D][uart_debug:176]: <<< 242,242,1,3,3,38,15,60,126
[20:40:28][D][uart_debug:176]: <<< 242,242,1,3,3,35,15,57,126
[20:40:28][D][uart_debug:176]: <<< 242,242,1,3,3,31,15,53,126
[20:40:29][D][uart_debug:176]: <<< 242,242,1,3,3,29,15,51,126
[20:40:29][D][uart_debug:176]: <<< 242,242,1,3,3,29,15,51,126