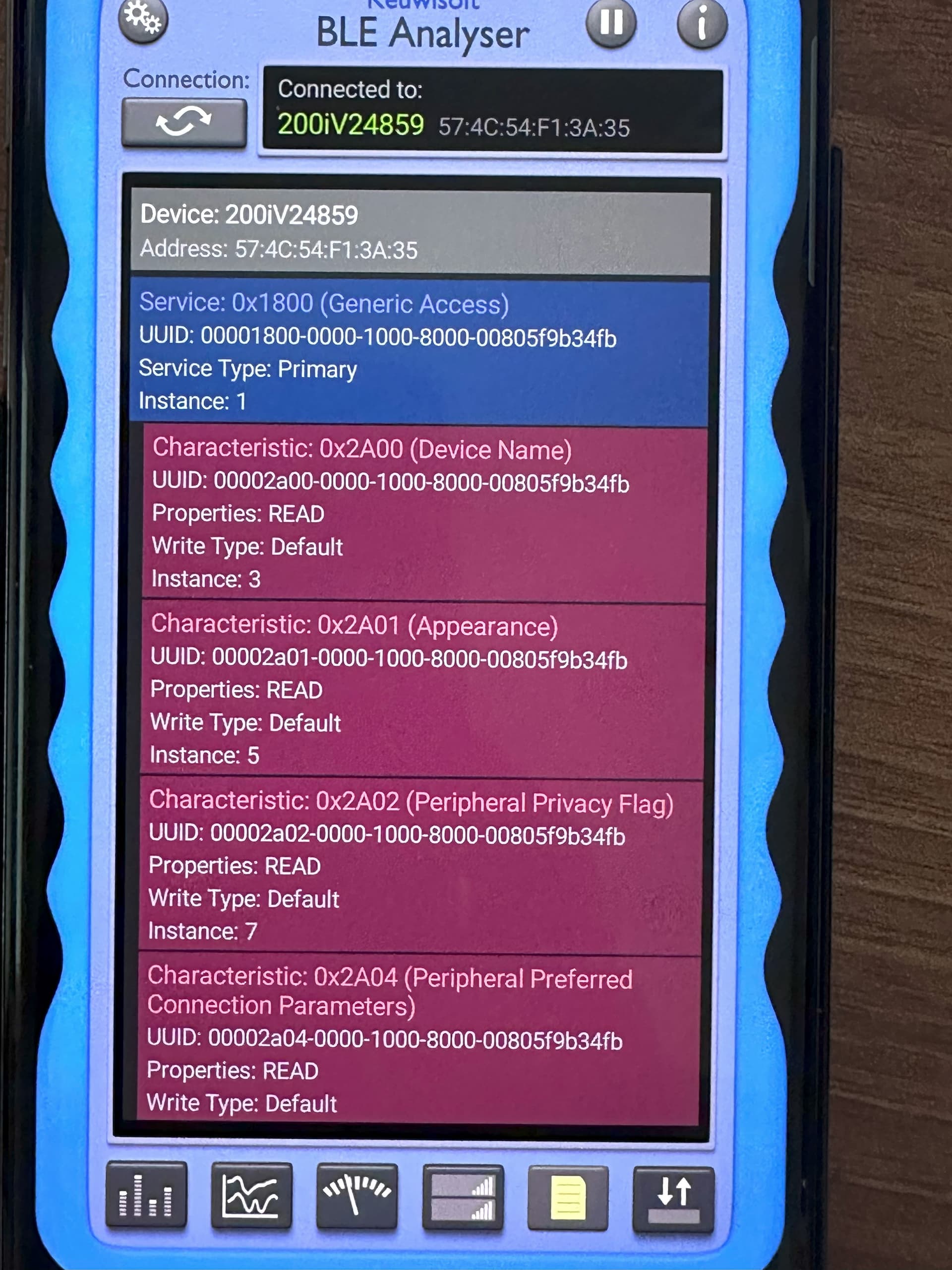
Turns out IOS and Mac do not show the correct UUID they randomise them! and they will not expose the MAC Address! going to try to get my hand on a device that runs non IOS/Mac OS
Thanks for you help! When I do get it working, how easy is it to add Feed Up and Head Down?
Easy enough, just copy and paste and extend the code; the commands captured already.
byte commands[7][5] = {
{0x6e, 0x01, 0x00, 0x3c, 0xab}, // light
{0x6e, 0x01, 0x00, 0x45, 0xb4}, // zg
{0x6e, 0x01, 0x00, 0x31, 0xa0}, // flat
{0x6e, 0x01, 0x00, 0x24, 0x93}, // head up
{0x6e, 0x01, 0x00, 0x25, 0x94}, // head down
{0x6e, 0x01, 0x00, 0x26, 0x95}, // feet up
{0x6e, 0x01, 0x00, 0x27, 0x96} // feet down
};
rest_command:
bed_flat:
url: "http://192.168.1.248:5000/flat"
method: post
bed_zerog:
url: "http://192.168.1.248:5000/zerog"
method: post
bed_light:
url: "http://192.168.1.248:5000/light"
method: post
bed_situp:
url: "http://192.168.1.248:5000/situp"
method: post
bed_feetdown:
url: "http://192.168.1.248:5000/feetdown"
method: post
} else if (header.indexOf("GET /zg") >= 0) {
Serial.println("BLE ZG");
pRemoteCharacteristic->writeValue(commands[1], sizeof(commands[1]));
} else if (header.indexOf("GET /flat") >= 0) {
Serial.println("BLE Flat");
pRemoteCharacteristic->writeValue(commands[2], sizeof(commands[2]));
} else if ...
It looks like my ESP version of the code expects /zg while my rest_command in home assistant is looking for /zerog though ![]()

What did you need to change just the Mac address?
Yup! once I know what it was. Just ending the ino file now to add Head Down and Feet Up,
Feetdown you have this,
} else if (header.indexOf(“GET /feetdown”) >= 0) {
Serial.println(“BLE Feet Down”);
int hold = 32;
while (hold >= 0) {
pRemoteCharacteristic->writeValue(commands[6], sizeof(commands[6]));
delay(250);
hold = hold - 1;
}
I assume i change to feetup, just trying to work out how this knows the correct byte command to send?
} else if (header.indexOf(“GET /feetup”) >= 0) {
Serial.println(“BLE Feet up”);
int hold = 32;
while (hold >= 0) {
pRemoteCharacteristic->writeValue(commands[6], sizeof(commands[6]));
delay(250);
hold = hold - 1;
}
pRemoteCharacteristic->writeValue(commands[5], sizeof(commands[5]));
isnt that the situp command?
else if (header.indexOf(“GET /situp”) >= 0) {
Serial.println(“BLE Situp”);
int hold = 32;
while (hold >= 0) {
pRemoteCharacteristic->writeValue(commands[5], sizeof(commands[5]));
delay(250);
hold = hold - 1;
}
hold = 90;
while (hold >= 0) {
pRemoteCharacteristic->writeValue(commands[3], sizeof(commands[3]));
delay(250);
hold = hold - 1;
}
byte commands[7][5] = {
{0x6e, 0x01, 0x00, 0x3c, 0xab}, // light
{0x6e, 0x01, 0x00, 0x45, 0xb4}, // zg
{0x6e, 0x01, 0x00, 0x31, 0xa0}, // flat
{0x6e, 0x01, 0x00, 0x24, 0x93}, // head up
{0x6e, 0x01, 0x00, 0x25, 0x94}, // head down
{0x6e, 0x01, 0x00, 0x26, 0x95}, // feet up
{0x6e, 0x01, 0x00, 0x27, 0x96} // feet down
};
light = 0, zg = 1 …
I think I implemented sit up as a combination of feet and head
Ah ok thanks make sense. All Working ![]()
Nice - Your raspberry pi version should work now as well, I use a pi zero and it’s pretty robust, I’ve configured the pi automatically run at start-up. I haven’t tested the ESP for any length of time.
1 Like