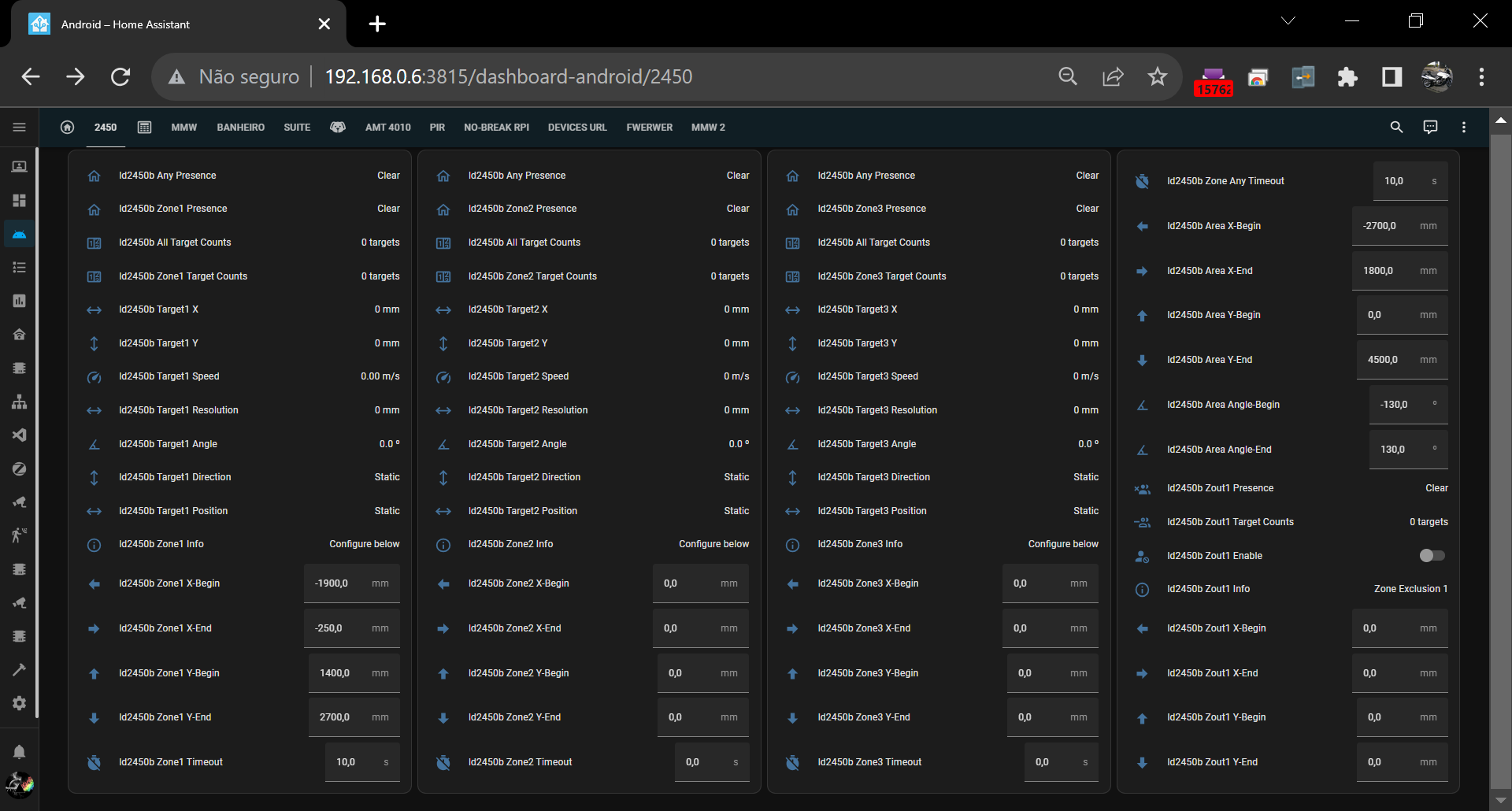
I’m not a developer, but here’s my setup based on the work of screek-workshop and Gus.
I added direction, position, angle (not very accurate but can be useful in some cases) and a general threshold for presence.

esphome:
name: ld2450b
friendly_name: ld2450b
platformio_options:
board_build.flash_mode: dio
on_boot:
- priority: 2000
then:
lambda: |-
id(any_target_exsits).publish_state(false);
id(zone1_target_exsits).publish_state(false);
id(zone2_target_exsits).publish_state(false);
id(zone3_target_exsits).publish_state(false);
id(zone_ex1_target_exsits).publish_state(false);
external_components:
- source:
type: git
url: https://github.com/screekworkshop/custom_components_support_for_screek_2a
ref: main
components: [esp32, uart]
globals:
- id: last_update_ld2450
type: unsigned long
restore_value: no
initial_value: '0'
- id: init_zone_publish
type: bool
restore_value: no
initial_value: "false"
improv_serial:
debug:
update_interval: 30s
text_sensor:
- platform: template
name: "Zone1 Info"
id: tips_zone1_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Configure below" };
update_interval: 1000s
- platform: template
name: "Zone2 Info"
id: tips_zone2_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Configure below" };
update_interval: 1000s
- platform: template
name: "Zone3 Info"
id: tips_zone3_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Configure below" };
update_interval: 1000s
- platform: template
name: "Zout1 Info"
id: tips_zone_ex1_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Zone Exclusion 1" };
update_interval: 1000s
- platform: template
name: "Target1 Direction"
id: target1_direction
icon: mdi:arrow-up-down
- platform: template
name: "Target2 Direction"
id: target2_direction
icon: mdi:arrow-up-down
- platform: template
name: "Target3 Direction"
id: target3_direction
icon: mdi:arrow-up-down
- platform: template
name: "Target1 Position"
id: target1_position
icon: mdi:arrow-left-right
- platform: template
name: "Target2 Position"
id: target2_position
icon: mdi:arrow-left-right
- platform: template
name: "Target3 Position"
id: target3_position
icon: mdi:arrow-left-right
number:
- platform: template
name: Area X-Begin
id: area_x_begin
min_value: -4000
max_value: 4000
initial_value: -4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
restore_value: True
- platform: template
name: Area X-End
id: area_x_end
mode: box
min_value: -4000
max_value: 4000
initial_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
optimistic: True
restore_value: True
- platform: template
name: Area Y-Begin
id: area_y_begin
mode: box
min_value: 0
max_value: 6000
initial_value: 0
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
- platform: template
name: Area Y-End
id: area_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 6000
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
- platform: template
name: Area Angle-Begin
id: area_angle_begin
icon: mdi:angle-acute
mode: box
min_value: -130 # In the readings, I obtained values of approximately 120º when passing behind the sensor
max_value: 130 # In the readings, I obtained values of approximately 120º when passing behind the sensor
initial_value: -130 # In the readings, I obtained values of approximately 120º when passing behind the sensor
entity_category: config
# device_class: distance
unit_of_measurement: 'º'
step: 1
optimistic: True
restore_value: True
- platform: template
name: Area Angle-End
id: area_angle_end
icon: mdi:angle-acute
# mode: box
min_value: -130 # In the readings, I obtained values of approximately 120º when passing behind the sensor
max_value: 130 # In the readings, I obtained values of approximately 120º when passing behind the sensor
initial_value: 130 # In the readings, I obtained values of approximately 120º when passing behind the sensor
entity_category: config
# device_class: distance
unit_of_measurement: 'º'
step: 1
optimistic: True
restore_value: True
- platform: template
name: Zone1 X-Begin
id: zone1_x_begin
min_value: -4000
max_value: 4000
initial_value: 0
# mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zone1 X-End
id: zone1_x_end
mode: box
min_value: -4000
max_value: 4000
initial_value: 0
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zone1 Y-Begin
id: zone1_y_begin
mode: box
min_value: 0
max_value: 6000
initial_value: 0
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zone1 Y-End
id: zone1_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zone2 X-Begin
id: zone2_x_begin
min_value: -4000
max_value: 4000
initial_value: 0
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zone2 X-End
id: zone2_x_end
mode: box
min_value: -4000
max_value: 4000
initial_value: 0
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zone2 Y-Begin
id: zone2_y_begin
mode: box
min_value: 0
max_value: 6000
initial_value: 0
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zone2 Y-End
id: zone2_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zone3 X-Begin
id: zone3_x_begin
min_value: -4000
max_value: 4000
initial_value: 0
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zone3 X-End
id: zone3_x_end
mode: box
min_value: -4000
max_value: 4000
initial_value: 0
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zone3 Y-Begin
id: zone3_y_begin
mode: box
min_value: 0
max_value: 6000
initial_value: 0
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zone3 Y-End
id: zone3_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zout1 X-Begin
id: zone_ex1_x_begin
min_value: -4000
max_value: 4000
initial_value: 0
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zout1 X-End
id: zone_ex1_x_end
mode: box
min_value: -4000
max_value: 4000
initial_value: 0
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zout1 Y-Begin
id: zone_ex1_y_begin
mode: box
min_value: 0
max_value: 6000
initial_value: 0
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
- platform: template
name: Zout1 Y-End
id: zone_ex1_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
- platform: template
name: "Zone Any Timeout"
id: zoneany_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone1 Timeout"
id: zone1_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone2 Timeout"
id: zone2_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone3 Timeout"
id: zone3_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
binary_sensor:
- platform: template
name: "Any Presence"
id: any_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
return id(zoneany_x_timeout).state * 1000.0;
- platform: template
name: "Zone1 Presence"
id: zone1_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
return id(zone1_x_timeout).state * 1000.0;
- platform: template
name: "Zone2 Presence"
id: zone2_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
return id(zone2_x_timeout).state * 1000.0;
- platform: template
name: "Zone3 Presence"
id: zone3_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
return id(zone3_x_timeout).state * 1000.0;
- platform: template
name: "Zout1 Presence"
id: zone_ex1_target_exsits
icon: mdi:account-multiple-remove
device_class: occupancy
sensor:
- platform: template
name: "All Target Counts"
id: all_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone1 Target Counts"
id: zone1_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone2 Target Counts"
id: zone2_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone3 Target Counts"
id: zone3_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zout1 Target Counts"
id: zone_ex1_target_count
accuracy_decimals: 0
icon: mdi:account-multiple-minus-outline
unit_of_measurement: "targets"
- platform: template
name: "Target1 X"
id: target1_x
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
- platform: template
name: "Target1 Y"
icon: mdi:arrow-up-down
id: target1_y
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
- platform: template
name: "Target1 Speed"
id: target1_speed
accuracy_decimals: 2
unit_of_measurement: 'm/s'
state_class: measurement
device_class: speed
- platform: template
name: "Target1 Resolution"
id: target1_resolution
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
- platform: template
name: "Target2 X"
id: target2_x
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
# update_interval: 1s
- platform: template
name: "Target2 Y"
icon: mdi:arrow-up-down
id: target2_y
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
- platform: template
name: "Target2 Speed"
id: target2_speed
accuracy_decimals: 0
unit_of_measurement: 'm/s'
state_class: measurement
device_class: speed
- platform: template
name: "Target2 Resolution"
id: target2_resolution
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
- platform: template
name: "Target3 X"
id: target3_x
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
- platform: template
name: "Target3 Y"
icon: mdi:arrow-up-down
id: target3_y
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
- platform: template
name: "Target3 Speed"
id: target3_speed
accuracy_decimals: 0
unit_of_measurement: 'm/s'
state_class: measurement
device_class: speed
# update_interval: 1s
- platform: template
name: "Target3 Resolution"
id: target3_resolution
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
- platform: template
name: "Target1 Angle"
id: target1_angle
unit_of_measurement: 'º'
icon: mdi:angle-acute
- platform: template
name: "Target2 Angle"
id: target2_angle
unit_of_measurement: 'º'
icon: mdi:angle-acute
- platform: template
name: "Target3 Angle"
id: target3_angle
unit_of_measurement: 'º'
icon: mdi:angle-acute
output:
- platform: ledc
pin: GPIO2
id: led
switch:
- platform: template
name: Zout1 Enable
id: zone_ex1_enable
optimistic: True
icon: mdi:account-cancel
entity_category: config
restore_mode: RESTORE_DEFAULT_OFF
button:
- platform: restart
icon: mdi:power-cycle
name: "ESP Reboot"
entity_category: diagnostic
- platform: factory_reset
name: Factory Reset
disabled_by_default: false
icon: mdi:heart-broken
uart:
id: uart_bus
tx_pin:
number: GPIO25
mode:
input: true
pullup: true
rx_pin:
number: GPIO32
mode:
input: true
pullup: true
baud_rate: 256000
parity: NONE
stop_bits: 1
data_bits: 8
debug:
direction: BOTH
dummy_receiver: True
after:
delimiter: [0X55, 0XCC]
sequence:
- lambda: |-
if ((millis() - id(last_update_ld2450)) <= 500) {
return;
};
id(last_update_ld2450) = millis();
// Calc X, Y, Speed and Resolution //
int16_t p1_x = (uint16_t((bytes[5] << 8) | bytes[4] ));
if ((bytes[5] & 0x80) >> 7) {
p1_x -= pow(2, 15);
} else {
p1_x = 0 - p1_x;
}
int16_t p1_y = (uint16_t((bytes[7] << 8) | bytes[6] ));
if ((bytes[7] & 0x80) >> 7) {
p1_y -= pow(2, 15);
} else {
p1_y = 0 - p1_y;
}
int p1_speed = (bytes[9] << 8 | bytes[8] );
if ((bytes[9] & 0x80) >> 7) {
p1_speed -= pow(2, 15);
} else {
p1_speed = 0 - p1_speed;
}
int16_t p1_distance_resolution = (uint16_t((bytes[11] << 8) | bytes[10] ));
int16_t p2_x = (uint16_t((bytes[13] << 8) | bytes[12] ));
if ((bytes[13] & 0x80) >> 7) {
p2_x -= pow(2, 15);
} else {
p2_x = 0 - p2_x;
}
int16_t p2_y = (uint16_t((bytes[15] << 8) | bytes[14] ));
if ((bytes[15] & 0x80) >> 7) {
p2_y -= pow(2, 15);
} else {
p2_y = 0 - p2_y;
}
int p2_speed = (bytes[17] << 8 | bytes[16] );
if ((bytes[17] & 0x80) >> 7) {
p2_speed -= pow(2, 15);
} else {
p2_speed = 0 - p2_speed;
}
int16_t p2_distance_resolution = (uint16_t((bytes[19] << 8) | bytes[18] ));
int16_t p3_x = (uint16_t((bytes[21] << 8) | bytes[20] ));
if ((bytes[21] & 0x80) >> 7) {
p3_x -= pow(2, 15);
} else {
p3_x = 0 - p3_x;
}
int16_t p3_y = (uint16_t((bytes[23] << 8) | bytes[22] ));
if ((bytes[23] & 0x80) >> 7) {
p3_y -= pow(2, 15);
} else {
p3_y = 0 - p3_y;
}
int p3_speed = (bytes[25] << 8 | bytes[24] );
if ((bytes[25] & 0x80) >> 7) {
p3_speed -= pow(2, 15);
} else {
p3_speed = 0 - p3_speed;
}
int16_t p3_distance_resolution = (uint16_t((bytes[27] << 8) | bytes[26] ));
// Calc X, Y, Speed and Resolution //
float p1_a = (p1_x);
float p1_b = (p1_y);
float p1_c = ((p1_a / p1_b) * 180 / 3.14159265359);
if (p1_x == 0) {
id(target1_angle).publish_state(0);
} else {
id(target1_angle).publish_state(p1_c);
}
float p2_a = (p2_x);
float p2_b = (p2_y);
float p2_c = ((p2_a / p2_b) * 180 / 3.14159265359);
if (p2_x == 0) {
id(target2_angle).publish_state(0);
} else {
id(target2_angle).publish_state(p2_c);
}
float p3_a = (p3_x);
float p3_b = (p3_y);
float p3_c = ((p3_a / p3_b) * 180 / 3.14159265359);
if (p3_x == 0) {
id(target3_angle).publish_state(0);
} else {
id(target3_angle).publish_state(p3_c);
}
int16_t area_x_min = id(area_x_begin).state; // - x_tolerance;
int16_t area_x_max = id(area_x_end).state; // + x_tolerance;
int16_t area_y_min = id(area_y_begin).state; // - y_tolerance;
int16_t area_y_max = id(area_y_end).state; // + y_tolerance;
int16_t area_angle_min = id(area_angle_begin).state; // + y_tolerance;
int16_t area_angle_max = id(area_angle_end).state; // + y_tolerance;
bool p1_valid = ((p1_x != 0 || p1_y > 0) && p1_x >= area_x_min && p1_x <= area_x_max && p1_y >= area_y_min && p1_y <= area_y_max && p1_c >= area_angle_min && p1_c <= area_angle_max);
bool p2_valid = ((p2_x != 0 || p2_y > 0) && p2_x >= area_x_min && p2_x <= area_x_max && p2_y >= area_y_min && p2_y <= area_y_max && p2_c >= area_angle_min && p2_c <= area_angle_max);
bool p3_valid = ((p3_x != 0 || p3_y > 0) && p3_x >= area_x_min && p3_x <= area_x_max && p3_y >= area_y_min && p3_y <= area_y_max && p3_c >= area_angle_min && p3_c <= area_angle_max);
int16_t target_count_in_zone_ex1 = 0;
int16_t zone_ex1_x_min = id(zone_ex1_x_begin).state; // - x_ex_tolerance;
int16_t zone_ex1_x_max = id(zone_ex1_x_end).state; // + x_ex_tolerance;
int16_t zone_ex1_y_min = id(zone_ex1_y_begin).state; // - y_ex_tolerance;
int16_t zone_ex1_y_max = id(zone_ex1_y_end).state; // + y_ex_tolerance;
bool p1_zone_ex_enter = false;
bool p2_zone_ex_enter = false;
bool p3_zone_ex_enter = false;
if (id(zone_ex1_enable).state) {
if (p1_valid) {
if (p1_x >= zone_ex1_x_min && p1_x <= zone_ex1_x_max && p1_y >= zone_ex1_y_min && p1_y <= zone_ex1_y_max) {
p1_zone_ex_enter = true;
target_count_in_zone_ex1 ++;
}
}
if (p2_valid) {
if (p2_x >= zone_ex1_x_min && p2_x <= zone_ex1_x_max && p2_y >= zone_ex1_y_min && p2_y <= zone_ex1_y_max) {
p2_zone_ex_enter = true;
target_count_in_zone_ex1 ++;
}
}
if (p3_valid) {
if (p3_x >= zone_ex1_x_min && p3_x <= zone_ex1_x_max && p3_y >= zone_ex1_y_min && p3_y <= zone_ex1_y_max) {
p3_zone_ex_enter = true;
target_count_in_zone_ex1 ++;
}
}
}
bool has_target_in_zone_ex1 = (target_count_in_zone_ex1 > 0);
int16_t all_target_counts = 0;
if (p1_valid && !p1_zone_ex_enter) {
all_target_counts ++;
}
if (p2_valid && !p2_zone_ex_enter) {
all_target_counts ++;
}
if (p3_valid && !p3_zone_ex_enter) {
all_target_counts ++;
}
bool has_target_in_zone_all = (all_target_counts > 0);
int16_t target_count_in_zone1 = 0;
int16_t zone1_x_min = id(zone1_x_begin).state; // - x_tolerance;
int16_t zone1_x_max = id(zone1_x_end).state; // + x_tolerance;
int16_t zone1_y_min = id(zone1_y_begin).state; // - y_tolerance;
int16_t zone1_y_max = id(zone1_y_end).state; // + y_tolerance;
if (p1_valid && !p1_zone_ex_enter) {
if (p1_x >= zone1_x_min && p1_x <= zone1_x_max && p1_y >= zone1_y_min && p1_y <= zone1_y_max) {
target_count_in_zone1 ++;
}
}
if (p2_valid && !p2_zone_ex_enter) {
if (p2_x >= zone1_x_min && p2_x <= zone1_x_max && p2_y >= zone1_y_min && p2_y <= zone1_y_max) {
target_count_in_zone1 ++;
}
}
if (p3_valid && !p3_zone_ex_enter) {
if (p3_x >= zone1_x_min && p3_x <= zone1_x_max && p3_y >= zone1_y_min && p3_y <= zone1_y_max) {
target_count_in_zone1 ++;
}
}
bool has_target_in_zone1 = (target_count_in_zone1 > 0);
int16_t target_count_in_zone2 = 0;
int16_t zone2_x_min = id(zone2_x_begin).state; // - x_tolerance;
int16_t zone2_x_max = id(zone2_x_end).state; // + x_tolerance;
int16_t zone2_y_min = id(zone2_y_begin).state; // - y_tolerance;
int16_t zone2_y_max = id(zone2_y_end).state; // + y_tolerance;
if (p1_valid && !p1_zone_ex_enter) {
if (p1_x >= zone2_x_min && p1_x <= zone2_x_max && p1_y >= zone2_y_min && p1_y <= zone2_y_max) {
target_count_in_zone2 ++;
}
}
if (p2_valid && !p2_zone_ex_enter) {
if (p2_x >= zone2_x_min && p2_x <= zone2_x_max && p2_y >= zone2_y_min && p2_y <= zone2_y_max) {
target_count_in_zone2 ++;
}
}
if (p3_valid && !p3_zone_ex_enter) {
if (p3_x >= zone2_x_min && p3_x <= zone2_x_max && p3_y >= zone2_y_min && p3_y <= zone2_y_max) {
target_count_in_zone2 ++;
}
}
bool has_target_in_zone2 = (target_count_in_zone2 > 0);
int16_t target_count_in_zone3 = 0;
int16_t zone3_x_min = id(zone3_x_begin).state; // - x_tolerance;
int16_t zone3_x_max = id(zone3_x_end).state; // + x_tolerance;
int16_t zone3_y_min = id(zone3_y_begin).state; // - y_tolerance;
int16_t zone3_y_max = id(zone3_y_end).state; // + y_tolerance;
if (p1_valid && !p1_zone_ex_enter) {
if (p1_x >= zone3_x_min && p1_x <= zone3_x_max && p1_y >= zone3_y_min && p1_y <= zone3_y_max) {
target_count_in_zone3 ++;
}
}
if (p2_valid && !p2_zone_ex_enter) {
if (p2_x >= zone3_x_min && p2_x <= zone3_x_max && p2_y >= zone3_y_min && p2_y <= zone3_y_max) {
target_count_in_zone3 ++;
}
}
if (p3_valid && !p3_zone_ex_enter) {
if (p3_x >= zone3_x_min && p3_x <= zone3_x_max && p3_y >= zone3_y_min && p3_y <= zone3_y_max) {
target_count_in_zone3 ++;
}
}
bool has_target_in_zone3 = (target_count_in_zone3 > 0);
if (id(target1_x).state != p1_x) {
id(target1_x).publish_state(p1_x);
}
if (id(target1_y).state != p1_y) {
id(target1_y).publish_state(p1_y);
}
float p1_m_speed = float(p1_speed) / 100.0;
if (id(target1_speed).state != p1_m_speed) {
id(target1_speed).publish_state(p1_m_speed);
}
if (id(target1_resolution).state != p1_distance_resolution) {
id(target1_resolution).publish_state(p1_distance_resolution);
}
if (id(target2_x).state != p2_x) {
id(target2_x).publish_state(p2_x);
}
if (id(target2_y).state != p2_y) {
id(target2_y).publish_state(p2_y);
}
if (id(target2_speed).state != p2_speed) {
id(target2_speed).publish_state(p2_speed);
}
if (id(target2_resolution).state != p2_distance_resolution) {
id(target2_resolution).publish_state(p2_distance_resolution);
}
if (id(target3_x).state != p3_x) {
id(target3_x).publish_state(p3_x);
}
if (id(target3_y).state != p3_y) {
id(target3_y).publish_state(p3_y);
}
if (id(target3_speed).state != p3_speed) {
id(target3_speed).publish_state(p3_speed);
}
if (id(target3_resolution).state != p3_distance_resolution) {
id(target3_resolution).publish_state(p3_distance_resolution);
}
if (id(all_target_count).state != all_target_counts) {
id(all_target_count).publish_state(all_target_counts);
}
if (id(any_target_exsits).state != has_target_in_zone_all) {
id(any_target_exsits).publish_state(has_target_in_zone_all);
}
if (id(all_target_count).state != all_target_counts) {
id(all_target_count).publish_state(all_target_counts);
}
if (id(any_target_exsits).state != has_target_in_zone_all) {
id(any_target_exsits).publish_state(has_target_in_zone_all);
}
if (id(zone1_target_count).state != target_count_in_zone1) {
id(zone1_target_count).publish_state(target_count_in_zone1);
}
if (id(zone1_target_exsits).state != has_target_in_zone1) {
id(zone1_target_exsits).publish_state(has_target_in_zone1);
}
if (id(zone2_target_count).state != target_count_in_zone2) {
id(zone2_target_count).publish_state(target_count_in_zone2);
}
if (id(zone2_target_exsits).state != has_target_in_zone2 ) {
id(zone2_target_exsits).publish_state(has_target_in_zone2);
}
if (id(zone3_target_count).state != target_count_in_zone3) {
id(zone3_target_count).publish_state(target_count_in_zone3);
}
if (id(zone3_target_exsits).state != has_target_in_zone3) {
id(zone3_target_exsits).publish_state(has_target_in_zone3);
}
if (id(zone_ex1_target_count).state != target_count_in_zone_ex1) {
id(zone_ex1_target_count).publish_state(target_count_in_zone_ex1);
}
if (id(zone_ex1_target_exsits).state != has_target_in_zone_ex1) {
id(zone_ex1_target_exsits).publish_state(has_target_in_zone_ex1);
}
id(init_zone_publish) = true;
// Angle, Position and Direction //
if (p1_speed == 0) {
id(target1_direction).publish_state("Static");
} else if (p1_speed > 0) {
id(target1_direction).publish_state("Moving away");
} else if (p1_speed < 0) {
id(target1_direction).publish_state("Approaching");
}
if (p2_speed == 0) {
id(target2_direction).publish_state("Static");
} else if (p2_speed > 0) {
id(target2_direction).publish_state("Moving away");
} else if (p2_speed < 0) {
id(target2_direction).publish_state("Approaching");
}
if (p3_speed == 0) {
id(target3_direction).publish_state("Static");
} else if (p3_speed > 0) {
id(target3_direction).publish_state("Moving away");
} else if (p3_speed < 0) {
id(target3_direction).publish_state("Approaching");
}
if (p1_x == 0) {
id(target1_position).publish_state("Static");
} else if (p1_x > 0) {
id(target1_position).publish_state("Right");
} else if (p1_x < 0) {
id(target1_position).publish_state("Left");
}
if (p2_x == 0) {
id(target2_position).publish_state("Static");
} else if (p2_x > 0) {
id(target2_position).publish_state("Right");
} else if (p2_x < 0) {
id(target2_position).publish_state("Left");
}
if (p3_x == 0) {
id(target3_position).publish_state("Static");
} else if (p3_x > 0) {
id(target3_position).publish_state("Right");
} else if (p3_x < 0) {
id(target3_position).publish_state("Left");
}
if ((p1_valid) || (p2_valid) || (p3_valid)) {
id(led).set_level(0.0);
} else {
id(led).set_level(1.0);
}
// Angle, Position and Direction //