Warning: This might make you scratch your head a bit!!

The Goal: Convert distance patio door is open in meters to a % to open the vertical blind and not have it change from 35% to 40% to 35% to 40% yet have it change within 5s from 35% to 60%.
Input: ESPHome -platform vl53l0x, range 0.00m to 0.80m (0 to 32 inches), every 5s.
Adjust blind position: 0% to 60% in steps of 5%.
So far: I have a template that converts the distance in metres to desired percent, in increments of 5%.
Problem: With the variations every 5s in measured distance, the templated percent can bounce from 35% to 40% to 35% to 40%.
Desired Solution: Figure out how to prevent small fluctuations in measurements from constantly re-adjusting the blind yet immediately adjust the blind when there is a large change!
ESPHome config:
esphome:
name: patio-door-distance-sensor
friendly_name: Patio Door Distance Sensor
esp32:
board: esp32dev
framework:
type: arduino
# Enable logging
logger:
# Enable Home Assistant API
api:
encryption:
key: "<redacted>"
ota:
password: "<redacted>"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "Patio-Door-Distance"
password: "<redacted>"
captive_portal:
i2c:
sda: 21
scl: 22
scan: true
id: bus_a
sensor:
- platform: vl53l0x
name: "Patio Door Distance"
address: 0x29
update_interval: 5s
long_range: true
unit_of_measurement: "m"
filters:
- calibrate_linear:
- 0.0 -> 0.0
- 0.19 -> 0.24
- 0.80 -> 0.80
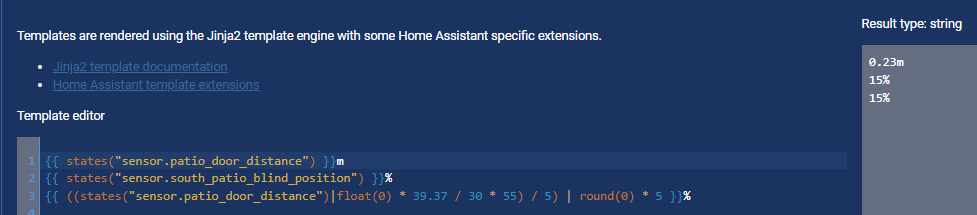
Sensor template:
{{ ((states("sensor.patio_door_distance")|float(0) * 39.37 / 30 * 55) / 5) | round(0) * 5 }}
I have tried a compensation sensor but it requires a numerical input and this one is string.
south_patio_vertical_blind_position:
# source: sensor.south_patio_door_open_distance
source: sensor.patio_door_distance
unit_of_measurement: "%"
lower_limit: true
upper_limit: true
precision: 0
data_points:
- [0.2, 80.0]
- [0, 60]
I also tried - platform: average but it’s too slow to update to large changes.
- platform: average
name: Patio Door Position
unique_id: patio_door_position
duration: 00:02:00
entities:
- sensor.patio_door_distance