BramNH
May 23, 2024, 9:11am
1
Because I don’t have a 3D printer (yet), and was thinking of a cool and convenient way to deploy a voice assistant. LEGO is a cool alternative to 3D printing to build a casing, but definitely not cheap! The servo movement sound gives you confirmation that the wake word is detected and is very helpful when you are not able to see the lights of the ATOM echo. But I also made sure you can see the lights of the ATOM echo through the front, so you can see when VAD starts and stops.
It looks really nice on the shelf! However it’s just a fun project . The ATOM echo is not a premium product, so this voice assistant (in terms of microphone/speaker hardware) is far off the standards of Google and Alexa.
I am combining this with local AI, which works a lot better when the command is misheard from a distance. (The demo video above is using the default HA Conversation agent).
build files )
Llama-cpp-python Docker container (build files )
Extended OpenAI HACS Integration (modified fork )
Functionary Small V2.4 LL…
The R2D2 Voice Assistant is based on this demo video .
7 Likes
markyskus
July 10, 2024, 12:58pm
2
This is awesome, are you using the m5stack for controlling the servo or using a second ESP modul?
BramNH
July 10, 2024, 1:55pm
3
Thanks! The servo is connected to the Atom Echo, so no extra ESP used.
markyskus
July 10, 2024, 2:55pm
4
Could you please share the ESP config, I couldn’t handled it.
BramNH
July 10, 2024, 2:59pm
5
Will do when I find the time! (Hopefully tomorrow)
BramNH
July 11, 2024, 5:39pm
7
esphome:
name: m5stack-atom-echo-226060-226060
name_add_mac_suffix: false
friendly_name: M5Stack Atom Echo 226060
project:
name: m5stack.atom-echo-voice-assistant
version: "1.0"
min_version: 2023.11.1
############# Tried to add a R2D2 reaction after wakeword detected, but speaker cant be used ##########
# includes:
# - r2d2.h
esp32:
board: m5stack-atom
framework:
type: esp-idf
# Enable logging
logger:
# Enable Home Assistant API
api:
encryption:
key: "kcExnLd4TyDcQ3OD9jF/FnsNTNjme4UFxjw96Xx1nuw="
ota:
password: "e6b40e3f40f1434978f0113da5246078"
dashboard_import:
package_import_url: github://esphome/firmware/voice-assistant/m5stack-atom-echo.yaml@main
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
on_connect:
- delay: 5s # Gives time for improv results to be transmitted
- ble.disable:
on_disconnect:
- ble.enable:
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "M5Stack-Atom-Echo"
password: "KXDLC8pEgAFK"
captive_portal:
improv_serial:
esp32_improv:
authorizer: none
# Using ledc output to control a standard 50Hz RC servo over the normal 1 to 2 mS pulse range
output:
- platform: ledc
pin: GPIO21
id: servo
frequency: 50 Hz
min_power: 5.0% # 5% at 50Hz is 1mS (20mS cycles)
max_power: 10.0% # 10% at 50Hz is 2mS (20mS cycles)
number:
- platform: template
name: "Servo Control"
optimistic: true
min_value: 0
max_value: 100
step: 1
on_value:
- then:
- lambda: !lambda |-
id(servo).set_level(x / 100);
button:
- platform: factory_reset
id: factory_reset_btn
name: Factory reset
i2s_audio:
i2s_lrclk_pin: GPIO33
i2s_bclk_pin: GPIO19
microphone:
- platform: i2s_audio
id: echo_microphone
i2s_din_pin: GPIO23
adc_type: external
pdm: true
speaker:
- platform: i2s_audio
id: echo_speaker
i2s_dout_pin: GPIO22
dac_type: external
mode: mono
voice_assistant:
id: va
microphone: echo_microphone
speaker: echo_speaker
noise_suppression_level: 2
auto_gain: 31dBFS
volume_multiplier: 2.0
vad_threshold: 3
on_wake_word_detected:
- output.set_level:
id: servo
level: 50%
# - speaker.play:
# id: echo_speaker
# data: !lambda return r2d2_excited;
on_listening:
- light.turn_on:
id: led
blue: 100%
red: 0%
green: 100%
effect: "Slow Pulse"
on_stt_vad_end:
- light.turn_on:
id: led
blue: 100%
red: 0%
green: 100%
effect: "Fast Pulse"
on_tts_start:
- light.turn_on:
id: led
blue: 100%
red: 0%
green: 100%
brightness: 100%
effect: none
- output.set_level:
id: servo
level: 0%
- delay: 500ms
- output.set_level:
id: servo
level: 100%
on_end:
- delay: 100ms
- wait_until:
not:
speaker.is_playing:
- script.execute: reset_led
on_error:
- light.turn_on:
id: led
red: 100%
green: 0%
blue: 0%
brightness: 100%
effect: none
- delay: 1s
- script.execute: reset_led
on_client_connected:
- if:
condition:
switch.is_on: use_wake_word
then:
- voice_assistant.start_continuous:
- script.execute: reset_led
on_client_disconnected:
- if:
condition:
switch.is_on: use_wake_word
then:
- voice_assistant.stop:
- light.turn_off: led
binary_sensor:
- platform: gpio
pin:
number: GPIO39
inverted: true
name: Button
disabled_by_default: true
entity_category: diagnostic
id: echo_button
on_multi_click:
- timing:
- ON for at least 250ms
- OFF for at least 50ms
then:
- if:
condition:
switch.is_off: use_wake_word
then:
- if:
condition: voice_assistant.is_running
then:
- voice_assistant.stop:
- script.execute: reset_led
else:
- voice_assistant.start:
else:
- voice_assistant.stop
- delay: 1s
- script.execute: reset_led
- script.wait: reset_led
- voice_assistant.start_continuous:
- timing:
- ON for at least 10s
then:
- button.press: factory_reset_btn
light:
- platform: esp32_rmt_led_strip
id: led
name: None
disabled_by_default: true
entity_category: config
pin: GPIO27
default_transition_length: 0s
chipset: SK6812
num_leds: 1
rgb_order: grb
rmt_channel: 0
effects:
- pulse:
name: "Slow Pulse"
transition_length: 250ms
update_interval: 250ms
min_brightness: 50%
max_brightness: 100%
- pulse:
name: "Fast Pulse"
transition_length: 100ms
update_interval: 100ms
min_brightness: 50%
max_brightness: 100%
script:
- id: reset_led
then:
- if:
condition:
- switch.is_on: use_wake_word
- switch.is_on: use_listen_light
then:
- light.turn_on:
id: led
red: 100%
green: 89%
blue: 71%
brightness: 60%
effect: none
else:
- light.turn_off: led
switch:
- platform: template
name: Use wake word
id: use_wake_word
optimistic: true
restore_mode: RESTORE_DEFAULT_ON
entity_category: config
on_turn_on:
- lambda: id(va).set_use_wake_word(true);
- if:
condition:
not:
- voice_assistant.is_running
then:
- voice_assistant.start_continuous
- script.execute: reset_led
on_turn_off:
- voice_assistant.stop
- lambda: id(va).set_use_wake_word(false);
- script.execute: reset_led
- platform: template
name: Use listen light
id: use_listen_light
optimistic: true
restore_mode: RESTORE_DEFAULT_ON
entity_category: config
on_turn_on:
- script.execute: reset_led
on_turn_off:
- script.execute: reset_led
external_components:
- source: github://pr#5230
components:
- esp_adf
refresh: 0s
esp_adf:
interval:
- interval: 1s
then:
- if:
condition:
api.connected:
then:
- if:
condition:
and:
- switch.is_on: use_wake_word
- not:
- voice_assistant.is_running
then:
- voice_assistant.start_continuous:
sam2332
July 12, 2024, 6:26pm
9
How are you doing the r2d2 noises is that a seperate speaker?
BramNH
July 12, 2024, 6:40pm
10
Nope just the Atom Echo in there. I am using this TTS integration .
phgsbr
July 12, 2024, 9:39pm
11
Thank you so much, @BramNH . Im trying to build myself, your code will be very useful!
1 Like
ADN182
September 8, 2024, 6:53pm
12
Hi @BramNH , awesome, I love it !
I buy the same R2-D2 Lego to do it with my son, dou you have some picture of the implementation and link of what you have bought to do it ? (Witch servo ti plug with the atom) ?
Thank in advance !
BramNH
September 9, 2024, 5:50am
13
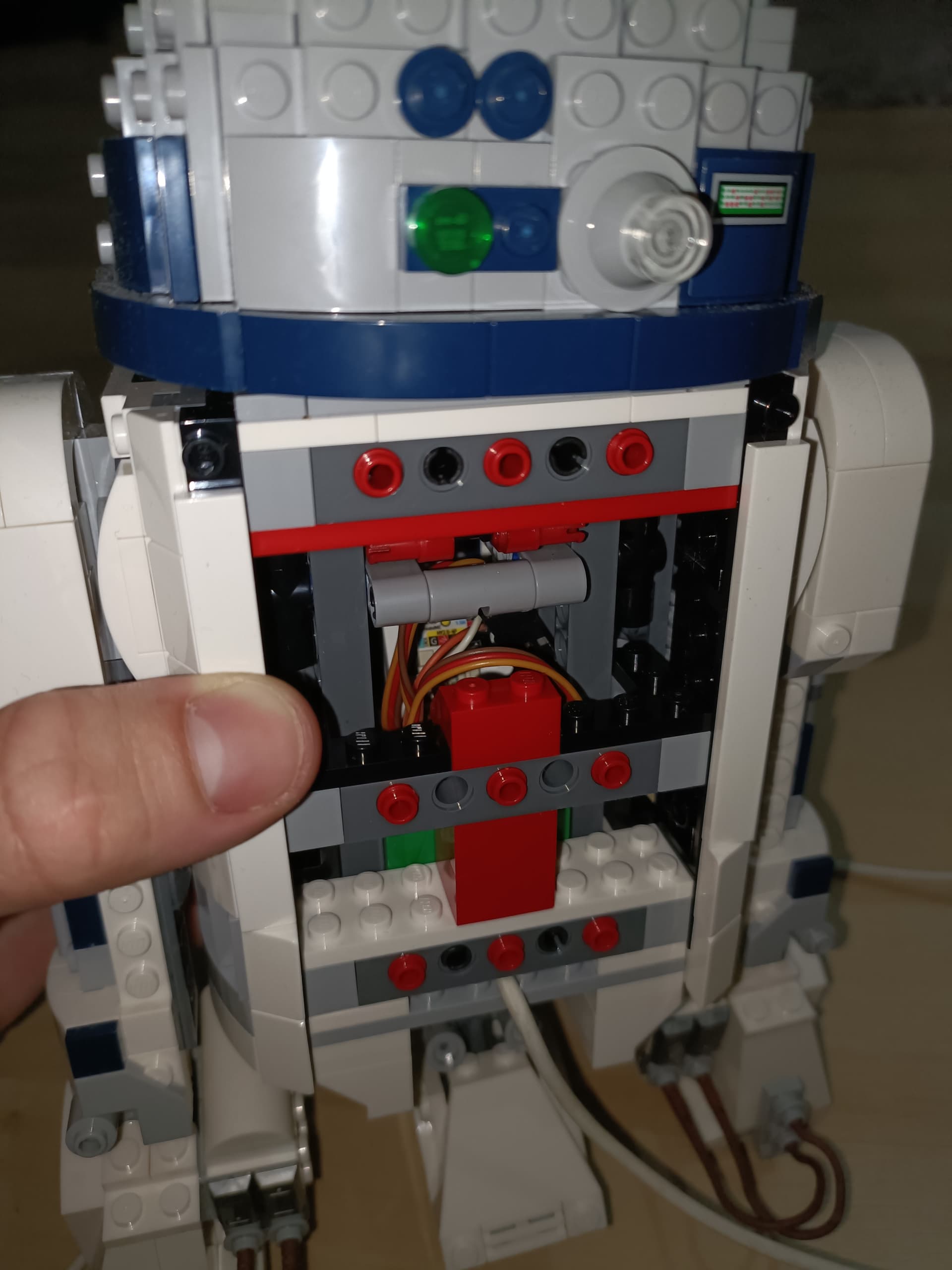
Thanks! I will add some pictures to this post this afternoon. I used a SG90 mini servo on which I screwed a flat Lego piece, that could be attached to the inside of the R2 head.
1 Like
BramNH
September 9, 2024, 6:09pm
14
I updated the post with pictures of the build
1 Like
ADN182
September 11, 2024, 7:45pm
15
Thank a lot, for sharing all that think ! R2-D2 building in progress
BramNH
September 11, 2024, 7:49pm
16
Yes indeed, servo is directly plugged into powered by the 5V pin and controlled by GPIO21 of the Atom Echo. Have fun!
1 Like
mikecoscia
November 16, 2024, 4:00pm
17
@BramNH hey this is great, I have been trying to integrate a servo with the atom echo for awhile now with no luck. I 3D printed a droid to use as a voice assistant. I gave your code a try, but it is giving me an error message…
INFO ESPHome 2024.10.3
INFO Reading configuration /config/esphome/esphome-web-23e8a4.yaml...
INFO Updating https://github.com/esphome/esphome.git@pull/5230/head
Failed config
ota.unknown: [source /config/esphome/esphome-web-23e8a4.yaml:27]
'ota' requires a 'platform' key but it was not specified.
password: e6b40e3f40f1434978f0113da5246078
BramNH
November 16, 2024, 6:58pm
18
You need to modify some things to make it work for your microcontroller. OTA password is a unique password for Over The Air updates (this one for my device). Follow the esphome tutorial to get to know more about this.
I also built this on a much older version of ESPHome (maybe 2024.6). So I am not sure if it is directly compatible with your 2024.10
mikecoscia
November 17, 2024, 1:27am
19
Thanks, I got it up and running! I just removed those few lines and was able to compile and install. Now just have to install it in my droid. Here is the code in case anyone else runs into the issue. Thanks again!
esphome:
name: atom-echo-r5-astromech
name_add_mac_suffix: false
friendly_name: Atom Echo - R5 Astromech
project:
name: m5stack.atom-echo-r5-voice-assistant
version: "1.0"
min_version: 2023.11.1
############# Tried to add a R2D2 reaction after wakeword detected, but speaker cant be used ##########
# includes:
# - r2d2.h
esp32:
board: m5stack-atom
framework:
type: esp-idf
# Enable logging
logger:
# Enable Home Assistant API
api:
ota:
- platform: esphome
id: ota_esphome
dashboard_import:
package_import_url: github://esphome/firmware/voice-assistant/m5stack-atom-echo.yaml@main
wifi:
ssid:
password:
on_connect:
- delay: 5s # Gives time for improv results to be transmitted
- ble.disable:
on_disconnect:
- ble.enable:
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "M5Stack-Atom-Echo"
password: "KXDLC8pEgAFK"
captive_portal:
improv_serial:
esp32_improv:
authorizer: none
# Using ledc output to control a standard 50Hz RC servo over the normal 1 to 2 mS pulse range
output:
- platform: ledc
pin: GPIO21
id: servo
frequency: 50 Hz
min_power: 5.0% # 5% at 50Hz is 1mS (20mS cycles)
max_power: 10.0% # 10% at 50Hz is 2mS (20mS cycles)
number:
- platform: template
name: "Servo Control"
optimistic: true
min_value: 0
max_value: 100
step: 1
on_value:
- then:
- lambda: !lambda |-
id(servo).set_level(x / 100);
button:
- platform: factory_reset
id: factory_reset_btn
name: Factory reset
i2s_audio:
i2s_lrclk_pin: GPIO33
i2s_bclk_pin: GPIO19
microphone:
- platform: i2s_audio
id: echo_microphone
i2s_din_pin: GPIO23
adc_type: external
pdm: true
speaker:
- platform: i2s_audio
id: echo_speaker
i2s_dout_pin: GPIO22
dac_type: external
channel: mono
voice_assistant:
id: va
microphone: echo_microphone
speaker: echo_speaker
noise_suppression_level: 2
auto_gain: 31dBFS
volume_multiplier: 2.0
vad_threshold: 3
on_wake_word_detected:
- output.set_level:
id: servo
level: 50%
# - speaker.play:
# id: echo_speaker
# data: !lambda return r2d2_excited;
on_listening:
- light.turn_on:
id: led
blue: 100%
red: 0%
green: 100%
effect: "Slow Pulse"
on_stt_vad_end:
- light.turn_on:
id: led
blue: 100%
red: 0%
green: 100%
effect: "Fast Pulse"
on_tts_start:
- light.turn_on:
id: led
blue: 100%
red: 0%
green: 100%
brightness: 100%
effect: none
- output.set_level:
id: servo
level: 0%
- delay: 500ms
- output.set_level:
id: servo
level: 100%
on_end:
- delay: 100ms
- wait_until:
not:
speaker.is_playing:
- script.execute: reset_led
on_error:
- light.turn_on:
id: led
red: 100%
green: 0%
blue: 0%
brightness: 100%
effect: none
- delay: 1s
- script.execute: reset_led
on_client_connected:
- if:
condition:
switch.is_on: use_wake_word
then:
- voice_assistant.start_continuous:
- script.execute: reset_led
on_client_disconnected:
- if:
condition:
switch.is_on: use_wake_word
then:
- voice_assistant.stop:
- light.turn_off: led
binary_sensor:
- platform: gpio
pin:
number: GPIO39
inverted: true
name: Button
disabled_by_default: true
entity_category: diagnostic
id: echo_button
on_multi_click:
- timing:
- ON for at least 250ms
- OFF for at least 50ms
then:
- if:
condition:
switch.is_off: use_wake_word
then:
- if:
condition: voice_assistant.is_running
then:
- voice_assistant.stop:
- script.execute: reset_led
else:
- voice_assistant.start:
else:
- voice_assistant.stop
- delay: 1s
- script.execute: reset_led
- script.wait: reset_led
- voice_assistant.start_continuous:
- timing:
- ON for at least 10s
then:
- button.press: factory_reset_btn
light:
- platform: esp32_rmt_led_strip
id: led
name: None
disabled_by_default: true
entity_category: config
pin: GPIO27
default_transition_length: 0s
chipset: SK6812
num_leds: 1
rgb_order: grb
rmt_channel: 0
effects:
- pulse:
name: "Slow Pulse"
transition_length: 250ms
update_interval: 250ms
min_brightness: 50%
max_brightness: 100%
- pulse:
name: "Fast Pulse"
transition_length: 100ms
update_interval: 100ms
min_brightness: 50%
max_brightness: 100%
script:
- id: reset_led
then:
- if:
condition:
- switch.is_on: use_wake_word
- switch.is_on: use_listen_light
then:
- light.turn_on:
id: led
red: 100%
green: 89%
blue: 71%
brightness: 60%
effect: none
else:
- light.turn_off: led
switch:
- platform: template
name: Use wake word
id: use_wake_word
optimistic: true
restore_mode: RESTORE_DEFAULT_ON
entity_category: config
on_turn_on:
- lambda: id(va).set_use_wake_word(true);
- if:
condition:
not:
- voice_assistant.is_running
then:
- voice_assistant.start_continuous
- script.execute: reset_led
on_turn_off:
- voice_assistant.stop
- lambda: id(va).set_use_wake_word(false);
- script.execute: reset_led
- platform: template
name: Use listen light
id: use_listen_light
optimistic: true
restore_mode: RESTORE_DEFAULT_ON
entity_category: config
on_turn_on:
- script.execute: reset_led
on_turn_off:
- script.execute: reset_led
external_components:
- source: github://pr#5230
components:
- esp_adf
refresh: 0s
esp_adf:
interval:
- interval: 1s
then:
- if:
condition:
api.connected:
then:
- if:
condition:
and:
- switch.is_on: use_wake_word
- not:
- voice_assistant.is_running
then:
- voice_assistant.start_continuous:
1 Like