Here is a good read on the topic → https://embeddedartistry.com/blog/2018/06/04/demystifying-microcontroller-gpio-settings/
1 Like
Ok, so luck or talent seems to have run out!
It’s all looking right in HA but the “Diagnostic” always says “Home”. I have it in a drawer on my desk.
Wiring from the sensor to my D1 Mini is:
Tx to D1 (GPIO5)
Rx to D2 (GPIO4)
IO2 to D0 (GPIO16)
G to G
V to 5v
The important bit of YAML after captive_portal: looks like this:
web_server:
port: 80
version: 2
include_internal: true
auth:
username: "xxxxx"
password: "xxxxx"
http_request:
useragent: esphome/$device_name
timeout: 2s
switch:
- platform: safe_mode
internal: true
name: use_safe_mode
binary_sensor:
- platform: gpio
name: mmwave_in_bedroom
pin:
number: GPIO16
mode: INPUT_PULLDOWN
uart:
id: uart_bus
tx_pin: GPIO5
rx_pin: GPIO4
baud_rate: 115200
debug:
direction: BOTH
dummy_receiver: true
after:
delimiter: "\n"
sequence:
- lambda: UARTDebug::log_string(direction, bytes);
number:
- platform: template
name: distance
id: distance
min_value: 0
max_value: 1350
initial_value: 315
optimistic: true
step: 15
restore_value: true
unit_of_measurement: cm
set_action:
- uart.write: "sensorStop"
- delay: 1s
- uart.write: !lambda
int cm = (int)ceil(x / 15.0);
std::string cms = "detRangeCfg -1 0 " + to_string(cm);
return std::vector<unsigned char>(cms.begin(), cms.end());
- delay: 1s
- uart.write: "saveCfg 0x45670123 0xCDEF89AB 0x956128C6 0xDF54AC89"
- delay: 1s
- uart.write: "sensorStart"
- platform: template
name: latency
id: latency
min_value: 0
max_value: 65000
initial_value: 12500
optimistic: true
step: 25
restore_value: true
unit_of_measurement: ms
set_action:
- uart.write: "sensorStop"
- delay: 1s
- uart.write: !lambda
int ms = (int)ceil(x / 25.0);
std::string mss = "outputLatency -1 0 " + to_string(ms);
return std::vector<unsigned char>(mss.begin(), mss.end());
- delay: 1s
- uart.write: "saveCfg 0x45670123 0xCDEF89AB 0x956128C6 0xDF54AC89"
- delay: 1s
- uart.write: "sensorStart"
button:
- platform: restart
name: Restart $device_name
- platform: template
name: "factory_reset_dfrobot"
id: "factory_reset_dfrobot"
on_press:
- uart.write: "sensorStop"
- delay: 1s
- uart.write: "factoryReset 0x45670123 0xCDEF89AB 0x956128C6 0xDF54AC89"
- delay: 3s
- uart.write: "sensorStart"
I can read the logs and everything so the D! Mini is obviously working. The red light on the sensor is flashing on and off.
Am I missing something obvious?
Bah! Ignore that. I was looking at the wrong bit. Just seen the sensor bit and it’s working perfectly by the looks of it.
This is brilliant!
I’m intrigued though. I put it on my desk facing the closed door. Step son walks along the landing. Sensor triggers. What’s it detecting? His body through a closed door? Or the vibrations coming through the floorboards? Sitting with it pointing at me, no matter how still I sit, even if I hold my breath, I can’t get it to show “off”. If I sit in my office playing my guitar, my PIR will regularly switch the lights off and I have to wave. In fact, I’ve taken the PIR out of that room for that very reason. This would fix that. And switching lights off with no motion. At the moment, I have to set a delay of 3 to 5 minutes to get over things like if I’m stood chopping veg in the kitchen. With this, you could reduce that delay to seconds.
I think this cost me about £31 for the sensor and a couple of quid for the D1 mini. Ok, it’s “only” presence but that’s cheaper than a Hue sensor. I guess the only downside is that running it off battery is unlikely to be realistic.
Easy enough to test. Using phone to check sensor status, close door, stand still beside door. Wait for sensor to turn off (helps to set a fast off time). Wave hand behind the closed door (to test vibration theory).
Not all doors are created equal after all.
But I would also go as far as to configure the sensor so that the distance of the door is beyond the configured detection distance. While you can measure, please don’t assume the distance is pin-point accurate and test it.
This is the beauty of it ![]()
2 Likes
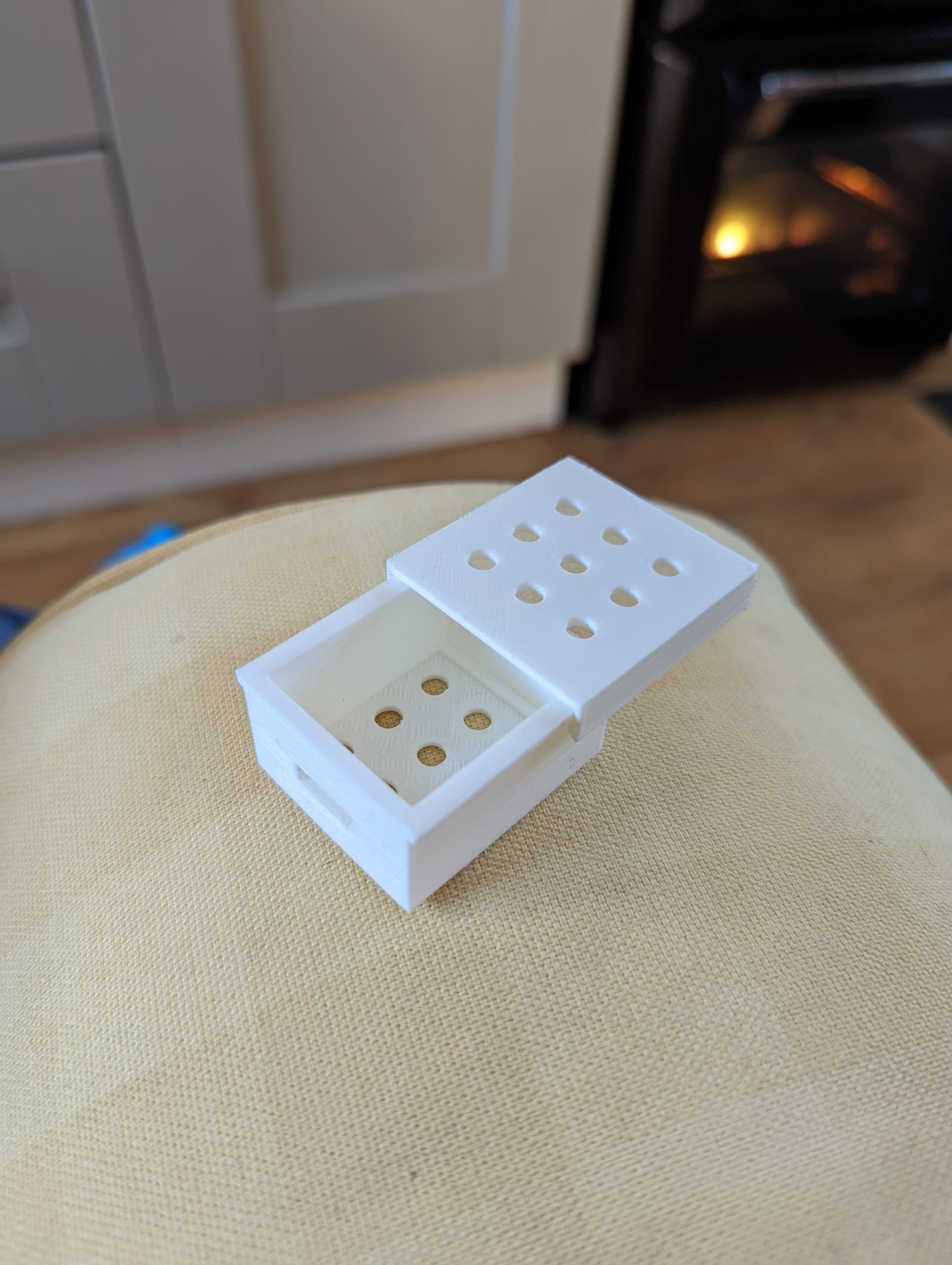
Here my 3D print is shared for you
Here the result with the cover (no issue)

Mmwave see people(s) not moving where Hue sensor see moving only. It works perfectly
2 Likes
The story so far.

This is the smallest i could get it. Luckily, 5v, G, TX and Rx line up with suitable pins on the D1 Mini. I’ve then got a short wire going from IO2 over to D0. Just got to model the top half now and add a sliding bit to good both halves together.
4 Likes

That’s a brilliant idea, bit annoyed I didn’t think of it when I soldered up mine now! It would have halved the size and more importantly… less of my poor soldering. This one is being stuck behind the TV cabinet luckily so not a problem but might be copying your idea for the second…


Whit these chips there’s no need for a hole in the cover, right?
Nice work all of you!
Nah no need for the hole in terms of signal strength, I have got the design with hole and without actually. I was going to see how hot it all ran before deciding if it should keep the hole for heat escape given it’s a sealed box otherwise!
1 Like
Holes are vital. It’s how the WiFi and radar particles can get out of the box 
2 Likes
I nearly went the same way as you. I’ve modified the box for mine now and it works nicely.

I need to make one more tweak and then I’ll be completely happy.
I need to make one more tweak and then I’ll be completely happy.
You mean design the HA logo into the top; am i right!?
2 Likes
Hold my beer…
4 Likes
Maybe you could get faster turn off times and have multi-zone detection by restarting the sensor. I believe the sensor calibrates at the beginning so that might cause it to not work. Maybe you could have zones say 0-3m 3-6m 6-9m to figure out which room or part of a larger space someone is in  the other sensor you mentioned is probably better for that sorta thing but I can’t quite justify $120~ Canadian for the best one.
the other sensor you mentioned is probably better for that sorta thing but I can’t quite justify $120~ Canadian for the best one.
Probably won’t try it but am curious.
And just so people know, the sensor does broadcast state over serial!
With a custom component or a yaml implementation & the DFRobot library you could save a pin if you cared.
If you try to return to digikey and it’s reasonable they just say here’s your money. Throw the thing out pls. At least when I did at one point for something worth ~$50

Haha, looks great!
1 Like