Wait what? I have 18 ESP32’s and every single one of them will let me configure UART RX/TX incorrectly and still boot fine. Can’t help you there.
uart:
Wait what? I have 18 ESP32’s and every single one of them will let me configure UART RX/TX incorrectly and still boot fine. Can’t help you there.
uart:
Not with mine, for some reason… ![]()
You agree that RX/TX works since I can enable/disable detection?
Disagree. detection_enabled is what controls the “give me target data” requests from the ESP to the K-LD7. When you turn it off, no requests are sent to the sensor. When you turn it on, requests are sent.
You need a working UART configuration for all of that to happen work as expected. That not only includes “my config compiles,” but that it is wired appropriately as well.
Perhaps a picture of your wiring may help.
[edit] - clarity
As you can see, I use the default TX (GPIO1) & RX (GPIO3) from ESP32 Wemos D1 Mini.
Btw; the GND looks red but are actually purple - not to be confused.
YELLOW - VCC
WHITE - GND
PURPLE - PULLDOWN
BLUE - RX (ESP)
GREEN - TX (ESP)
Indeed you’re right, I have problems receiving UART debugging…
Code:
esphome:
name: rfbeam
on_boot:
priority: 700
then:
- wait_until:
api.connected:
- script.execute: get_all_params_script
- switch.template.publish:
id: detection_enabled
state: ON
- switch.template.publish:
id: enable_logging
state: OFF
includes:
- kld7.h
esp32:
board: esp32dev
framework:
type: arduino
substitutions:
device_name: rfbeam
button:
- platform: restart
name: Restart $device_name
- platform: template
name: factory_reset_kld7 # RFSE
id: factory_reset_kld7
on_press:
- uart.write: [0x52, 0x46, 0x53, 0x45, 0x00, 0x00, 0x00, 0x00]
- delay: 2s
- uart.write: [0x49,0x4E,0x49,0x54,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00] # perform kld7 INIT
- platform: template
name: get_all_params # GRPS
id: get_all_params
on_press:
- script.execute: get_all_params_script
script:
- id: get_all_params_script
then:
- uart.write: [0x47, 0x52, 0x50, 0x53, 0x00, 0x00, 0x00, 0x00]
web_server:
port: 80
version: 2
include_internal: true
ota: false
# Enable logging
logger:
# baud_rate: 0 # disable logging over uart
logs:
sensor: ERROR
# Enable Home Assistant API
api:
mdns:
disabled: false
ota:
password: "yadda"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
power_save_mode: none
switch:
- platform: safe_mode
name: use_safe_mode $device_name
- platform: template
name: enable_logging
id: enable_logging
optimistic: true
- platform: template
name: detection_enabled
id: detection_enabled
optimistic: true
restore_state: true
turn_on_action:
- uart.write: [0x49,0x4E,0x49,0x54,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00] # perform kld7 INIT
- logger.log: "INIT sent"
turn_off_action:
- uart.write: [0x47, 0x42, 0x59, 0x45, 0x00, 0x00, 0x00, 0x00] # perform kld7 GBYE
number:
- platform: template
name: WLED_return_to_normal
id: WLED_return_to_normal
min_value: 1
max_value: 15
initial_value: 1
step: 1
restore_value: true
optimistic: true
- platform: template
name: LEDs_per_Meter
id: LEDs_per_Meter
min_value: 30
max_value: 144
initial_value: 60
step: 1
restore_value: true
optimistic: true
mode: box
- platform: template
name: distance_offset
id: distance_offset
min_value: -255
max_value: 255
initial_value: 0
step: 1
restore_value: true
unit_of_measurement: cm
optimistic: true
mode: box
- platform: template
name: max_speed # RSPI 0 = 12.5km/h, 1 = 25km/h, 2 = 50km/h, 3 = 100km/h
id: max_speed
min_value: 0
max_value: 3
initial_value: 1
step: 1
restore_value: true
unit_of_measurement: kph
set_action:
- uart.write: !lambda
return {0x52, 0x53, 0x50, 0x49, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: max_range # RRAI 0 = 5m, 1 = 10m, 2 = 30m, 3 = 100m
id: max_range
min_value: 0
max_value: 3
initial_value: 1
step: 1
restore_value: true
set_action:
- uart.write: !lambda
return {0x52, 0x52, 0x41, 0x49, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: threshold_offset # THOF 10-60 dB
id: threshold_offset
min_value: 10
max_value: 60
initial_value: 30
step: 1
restore_value: true
unit_of_measurement: dB
set_action:
- uart.write: !lambda
return {0x54, 0x48, 0x4F, 0x46, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: tracking_filter # TRFT 0 = Standard, 1 = Fast detection, 2 = Long visibility
id: tracking_filter
min_value: 0
max_value: 2
initial_value: 0
step: 1
restore_value: true
set_action:
- uart.write: !lambda
return {0x54, 0x52, 0x46, 0x54, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: vibration_suppression # VISU 0-16, 0 = No suppression, 16 = High suppression
id: vibration_suppression
min_value: 0
max_value: 16
initial_value: 2
step: 1
restore_value: true
set_action:
- uart.write: !lambda
return {0x56, 0x49, 0x53, 0x55, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: min_detection_dist # MIRA
id: min_detection_dist
min_value: 0
max_value: 100
initial_value: 0
step: 1
restore_value: true
unit_of_measurement: "%"
mode: box
set_action:
- uart.write: !lambda
return {0x4d, 0x49, 0x52, 0x41, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: max_detection_dist # MARA
id: max_detection_dist
min_value: 0
max_value: 100
initial_value: 50
step: 1
restore_value: true
unit_of_measurement: "%"
mode: box
set_action:
- uart.write: !lambda
return {0x4d, 0x41, 0x52, 0x41, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: min_detection_angle # MIAN -90° to +90°
id: min_detection_angle
min_value: -90
max_value: 90
initial_value: -90
step: 1
restore_value: true
unit_of_measurement: "°"
mode: box
set_action:
- uart.write: !lambda
return {0x4d, 0x49, 0x41, 0x4e, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: max_detection_angle # MAAN -90° to +90°
id: max_detection_angle
min_value: -90
max_value: 90
initial_value: 90
step: 1
restore_value: true
unit_of_measurement: "°"
mode: box
set_action:
- uart.write: !lambda
return {0x4d, 0x41, 0x41, 0x4e, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: min_detection_speed # MISP 0 – 100% of speed setting
id: min_detection_speed
min_value: 0
max_value: 100
initial_value: 0
step: 1
restore_value: true
unit_of_measurement: "%"
mode: box
set_action:
- uart.write: !lambda
return {0x4d, 0x49, 0x53, 0x50, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: max_detection_speed # MASP 0 – 100% of speed setting
id: max_detection_speed
min_value: 0
max_value: 100
initial_value: 100
step: 1
restore_value: true
unit_of_measurement: "%"
mode: box
set_action:
- uart.write: !lambda
return {0x4d, 0x41, 0x53, 0x50, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: detection_direction # DEDI 0 = Receding, 1 = Approaching, 2 = Both
id: detection_direction
min_value: 0
max_value: 2
initial_value: 2
step: 1
restore_value: true
set_action:
- uart.write: !lambda
return {0x44, 0x45, 0x44, 0x49, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: range_threshold # RATH 0 – 100% of range setting
id: range_threshold
min_value: 0
max_value: 100
initial_value: 10
step: 1
restore_value: true
unit_of_measurement: "%"
mode: box
set_action:
- uart.write: !lambda
return {0x52, 0x41, 0x54, 0x48, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: angle_threshold # ANTH -90° to +90°
id: angle_threshold
min_value: -90
max_value: 90
initial_value: 0
step: 1
restore_value: true
unit_of_measurement: "°"
mode: box
set_action:
- uart.write: !lambda
return {0x41, 0x4e, 0x54, 0x48, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: speed_threshold # SPTH 0 – 100% of speed setting
id: speed_threshold
min_value: 0
max_value: 100
initial_value: 50
step: 1
restore_value: true
unit_of_measurement: "%"
mode: box
set_action:
- uart.write: !lambda
return {0x53, 0x50, 0x54, 0x48, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
- platform: template
name: hold # HOLD 0 – 7200s 484f4c44
id: hold
min_value: 1
max_value: 7200
initial_value: 1
unit_of_measurement: sec
step: 1
restore_value: true
mode: box
set_action:
- uart.write: !lambda
return {0x48, 0x4f, 0x4c, 0x44, 0x04, 0x00, 0x00, 0x00, (unsigned char)x, 0x00, 0x00, 0x00};
sensor:
- platform: custom
lambda: |-
auto s = new kld7(id(uart_bus0));
App.register_component(s);
return {s->distance_sensor, s->speed_sensor, s->angle_sensor, s->db_sensor};
sensors:
- name: distance_sensor
id: distance_sensor
internal: false
unit_of_measurement: cm
- name: speed_sensor
id: speed_sensor
internal: true
unit_of_measurement: kph
- name: angle_sensor
id: angle_sensor
internal: false
unit_of_measurement: deg
- name: db_sensor
id: db_sensor
internal: true
unit_of_measurement: dB
uart:
id: uart_bus0
tx_pin: GPIO01
rx_pin: GPIO03
baud_rate: 115200
parity: EVEN
debug:
direction: RX
after:
delimiter: [0x52, 0x45, 0x53, 0x50, 0x01, 0x00, 0x00, 0x00, 0x00]
sequence:
- lambda: UARTDebug::log_hex(direction, bytes, ':');
binary_sensor:
- platform: gpio
name: kld7_detection
id: kld7_detection
pin:
number: GPIO16
mode: INPUT_PULLDOWN
on_state:
then:
while:
condition:
- binary_sensor.is_on: kld7_detection
- switch.is_on: detection_enabled
then:
- uart.write: [0x47,0x4E,0x46,0x44,0x04,0x00,0x00,0x00,0x08,0x00,0x00,0x00] # Get TDAT
- delay: !lambda
if (id(max_speed).state == 0) {
return 250;
} else if (id(max_speed).state == 1) {
return 125;
} else if (id(max_speed).state == 2) {
return 65;
} else if (id(max_speed).state == 3) {
return 35;
} else {
return 250;
}
kld7.h has not been modified.
Here is your hint ![]()
Do you see the conflict?
Changed the config:
uart:
id: uart_bus0
tx_pin: GPIO16
rx_pin: GPIO17
baud_rate: 115200
parity: EVEN
debug:
direction: RX
after:
delimiter: [0x52, 0x45, 0x53, 0x50, 0x01, 0x00, 0x00, 0x00, 0x00]
sequence:
- lambda: UARTDebug::log_hex(direction, bytes, ':');
# Enable logging
logger:
# baud_rate: 0 # disable logging over uart
logs:
sensor: DEBUG
All good 
Thank you @crlogic
Once you have confirmed target data being received I would recommend disabling the UART debug and setting sensor logging to INFO in order to prevent the ESP from being swamped and potentially resetting.
can you report on the differences? ie if my wife has a different resting heart vs me (via esphome)?
K-LD7 does not measure heart rate.
but can you report on the different subjects consistently?
What does ‘report’ mean to you? This is not an occupancy sensor.
It reports distance, angle, speed reliably. It doesn’t do that for “static” things. Only moving things within the vast number of configuration parameters.
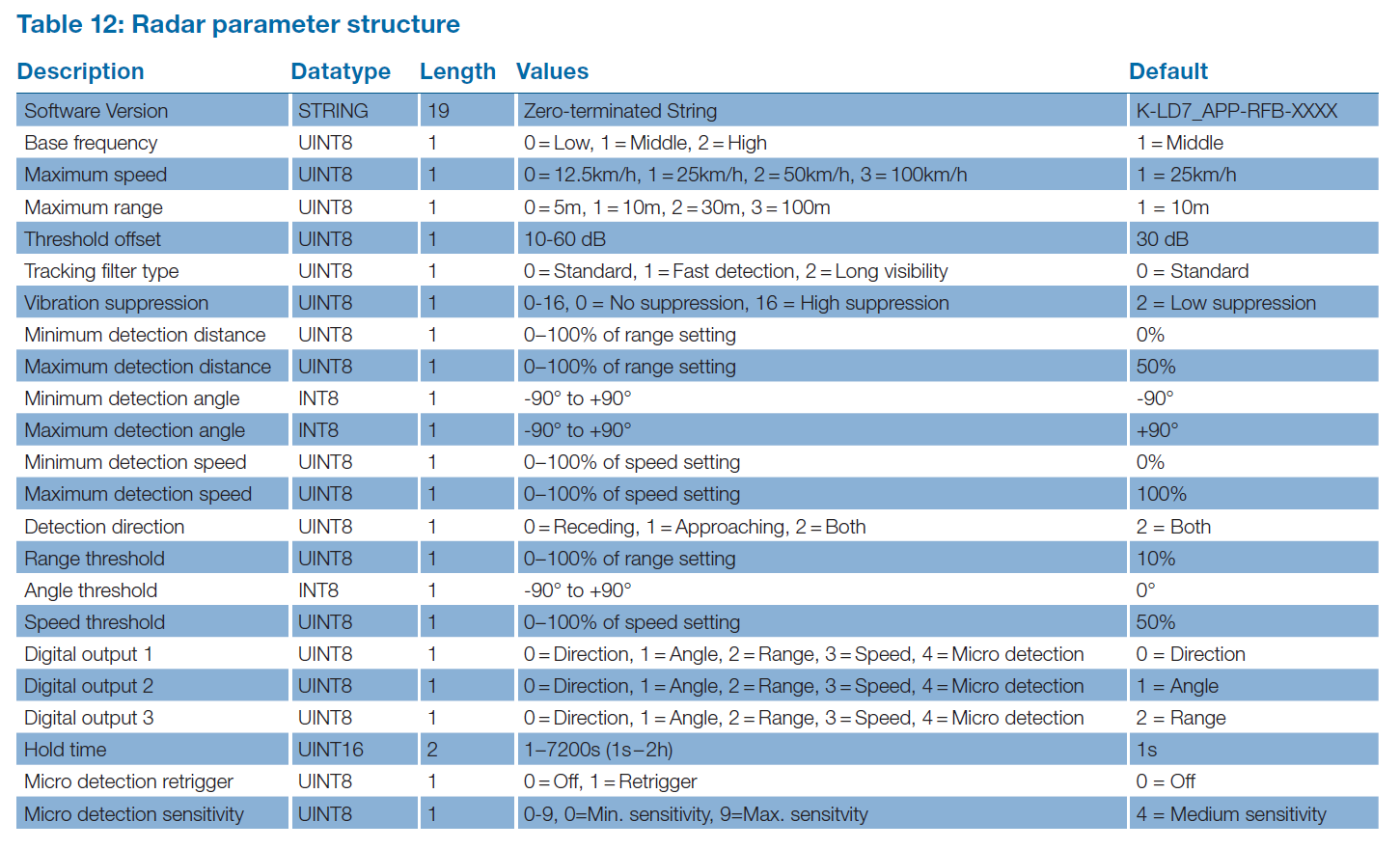
I would recommend reviewing the datasheet for a better understanding of the parameters.
For that you need to look at the Seeed 60GHz Heart and Breath version…
Think I will make some adjustments. When binary_sensor.kld7_detection are off, the state of the sensors remains what was last registered. When it goes to off, they should be ‘reset’ to 0. Don’t you agree?
Think I will make a doll’s head follow me when I walk in and through the room, should be piece of cake and a fun start using the angle detection.
Makes sense. You could implement a lambda that clears all values.
Eg.
on_state:
then:
- if:
condition:
- binary_sensor.is_off: kld7_detection
then:
- lambda: |-
id(distance_sensor).publish_state(0);
id(speed_sensor).publish_state(0);
I think you are onto something. The perfect Halloween display! The eyes glow red right?? ![]()
Link perhaps? does it work w/ esphome?
Seriously? It is the first google entry if you search for < Seeed 60GHz Heart and Breath >
seriously? cant answer both questions??? mainly curious about my last question…
Please keep it civil folks.
The interface is serial, and documented.
Hi David,
I see you got the link.
I’ve only tested these with ESP32 and Arduino, but with some work it will work with ESPHome,
Unfortunately I will not have the time to do this in the near future.