Post your whole config. Binary sensors as well
I’d like to point out that I also don’t want inferred endstops as then the cover would appear to be fully open/closed after the opening/closing duration completes but I might have stopped it midway or it hit an obstacle and reversed.
Here’s the config as it stands now:
esphome:
name: my-garage-door
friendly_name: My Garage Door
esp8266:
board: d1_mini
restore_from_flash: True
# Enable logging
logger:
# Enable Home Assistant API
api:
encryption:
key: "<redacted"
ota:
password: "<redacted>"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "Distance-Sensor Fallback Hotspot"
password: "<redacted>"
captive_portal:
light:
- platform: neopixelbus
variant: WS2812
pin: D8
num_leds: 20
type: rgb
name: "Parking Light Indicator"
id: parking_light_indicator
restore_mode: ALWAYS_OFF
sensor:
- platform: ultrasonic
name: 'parking_sensor'
id: parking_sensor
trigger_pin: D1
echo_pin: D2
unit_of_measurement: "m"
accuracy_decimals: 1
update_interval: 1s
timeout: 4.0m
pulse_time: 10us
filters:
- or:
- throttle: 30s
- delta: 5%
on_value:
then:
- if:
# turn light off when door closed
condition:
- binary_sensor.is_on:
id: closed_contact_sensor
then:
light.turn_off:
id: parking_light_indicator
- if:
# Show RED first
condition:
and:
- lambda: 'return id(parking_sensor).state < id(red_trigger_level).state;'
- binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
brightness: 100%
red: 100%
green: 0%
blue: 0%
- if:
# show YELLOW if getting close to correct spot
condition:
and:
- lambda: 'return id(parking_sensor).state < id(yellow_trigger_level).state;'
- binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
brightness: 100%
# yellow
red: 100%
green: 100%
blue: 0%
- if:
# Show GREEN when in right spot
condition:
and:
- lambda: 'return id(parking_sensor).state < id(green_trigger_level).state;'
- binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
brightness: 80%
red: 0%
green: 100%
blue: 0%
- platform: homeassistant
name: "Red Trigger Level"
id: "red_trigger_level"
entity_id: input_number.red_trigger_level
- platform: homeassistant
name: "Yellow Trigger Level"
id: "yellow_trigger_level"
entity_id: input_number.yellow_trigger_level
- platform: homeassistant
name: "Green Trigger Level"
id: "green_trigger_level"
entity_id: input_number.green_trigger_level
# Binary sensors to check if door is open or closed
binary_sensor:
# Vehicle Presence
- platform: template
name: Vehicle
device_class: presence
lambda:
if (id(parking_sensor).state < id(yellow_trigger_level).state) {
return true;
} else {
return false;
}
- platform: gpio
pin:
number: D5
mode: INPUT_PULLUP
inverted: True
name: "Open Contact Sensor"
id: open_contact_sensor
internal: False
# on_press:
# - cover.template.publish:
# id: template_cover
# state: OPEN
# current_operation: IDLE
# on_release:
# - cover.template.publish:
# id: template_cover
# current_operation: CLOSING
- platform: template
name: "Open Movement Sensor"
id: open_movement_sensor
lambda:
if (id(closed_contact_sensor).state) {
return false;
} else {
return true;
}
- platform: gpio
pin:
number: D6
mode: INPUT_PULLUP
inverted: True
name: "Closed Contact Sensor"
id: closed_contact_sensor
internal: False
# on_press:
# - cover.template.publish:
# id: template_cov
# state: CLOSED
# current_operation: IDLE
# on_release:
# - cover.template.publish:
# id: template_cov
# current_operation: OPENING
- platform: template
name: "Close Movement Sensor"
id: close_movement_sensor
lambda:
if (id(open_contact_sensor).state) {
return false;
} else {
return true;
}
# This creates the actual garage door in HA. The state is based on two contact sensors.
cover:
- platform: feedback
name: "Garage Door"
id: endstop_cover
device_class: garage
has_built_in_endstop: true
open_action:
- switch.turn_on: relay
open_duration: 10s
open_endstop: open_contact_sensor
# open_sensor: open_movement_sensor
close_action:
- switch.turn_on: relay
close_duration: 10s
close_endstop: closed_contact_sensor
# close_sensor: close_movement_sensor
stop_action:
- switch.turn_on: relay
#cover:
# - platform: template
# device_class: garage
# name: "Garage Door"
# id: template_cover
# has_position: True
# lambda: |-
# if (id(contact_sensor_open).state) {
# return COVER_OPEN;
# } else {
# if (id(contact_sensor_closed).state) {
# return COVER_CLOSED;
# } else {
# return {};
# }
# }
# ## Can I disable this action if current operation is OPENING?
# open_action:
# - switch.turn_on: relay
#
# ## Can I disable this action if current_operation is CLOSING?
# close_action:
# - switch.turn_on: relay
#
# ## Can I disable this action if state is OPEN or CLOSED?
# stop_action:
# - switch.turn_on: relay
# Relay Switch to send the pulse to the garage door opener button
switch:
- platform: gpio
pin: D7
name: "Garage Door Relay"
id: relay
internal: False
# Toggle the relay with a 0.5s pulse simulating a manual button press
on_turn_on:
- delay : 500ms
- switch.turn_off: relay
## To-do
# If id(contact_sensor_closed).state) == off AND id(contact_sensor_open).state) == off AND template_cov.current_operation is CLOSING
# Then
# cover.template.publish:
# id:template_cov
# current_operation: OPENING
# state: CLOSED
# If id(contact_sensor_closed).state) == off AND id(contact_sensor_open).state) == off AND template_cov.current_operation is OPENING
# Then
# cover.template.publish:
# id:template_cov
# current_operation: IDLE
# state: OPEN
Are both end_stops wired the same way? You’re using NO on both?
I’m using the two reed switches that come with OpenGarage

take the “inverted” off the bottom/closed reed switch. I don’t fully understand this but it’s what you need to do. It has something to do with like, the bottom being On/Closed and the top/Open and one needs to be on while the other is off… I reallyt cant explain it, just try it.
- platform: gpio
pin:
number: D6
mode: INPUT_PULLUP
inverted: False
name: "Closed Contact Sensor"
id: closed_contact_sensor
internal: False
Here is mine if it helps. You dont need the Text_sensor, I just use it so I can get the door state elsewhere in HA without having to use the cover over and over.
cover:
- platform: feedback
name: "Overhead"
id: overhead_2
has_built_in_endstop: true
max_duration: 17s
open_action:
- switch.toggle: cover_switch
- text_sensor.template.publish:
id: template_text
state: "Opening"
open_duration: 16s
open_endstop: top_reed_switch
#open_sensor: open_movement_binary_sensor
close_action:
- switch.toggle: cover_switch
- text_sensor.template.publish:
id: template_text
state: "Closing"
close_duration: 16s
close_endstop: bot_reed_switch
#close_sensor: close_movement_binary_sensor
stop_action:
- switch.turn_on: cover_switch
- text_sensor.template.publish:
id: template_text
state: "Stopped/Idle"
button:
- platform: restart
name: "Barn Sensors Restart"
- platform: safe_mode
name: "Barn Sensors (Safe Mode)"
binary_sensor:
- platform: gpio
pin:
number: D1
mode: INPUT_PULLUP
inverted: true
id: top_reed_switch
name: "top reed"
# filters:
# delayed_on: 16s
on_state:
if:
condition:
binary_sensor.is_on: top_reed_switch
then:
- text_sensor.template.publish:
id: template_text
state: "Open"
- platform: gpio
pin:
number: D5
mode: INPUT_PULLUP
# inverted: true
id: bot_reed_switch
name: "Bottom Reed"
# filters:
# delayed_off: 16s
on_state:
if:
condition:
binary_sensor.is_on: bot_reed_switch
then:
- text_sensor.template.publish:
id: template_text
state: "Closed"
You definately are doing it right by testing on a workbench! My garage
door was one of my first Esphome projects a couple years ago. I was so antsy to do it and just threw sensor and stuff up there. Ofcourse it didn’t work right and it’s a pain in @ss trying to troubleshoot stuff when it’s installed and even more so when it takes a ladder to get to it.
Something else to think about…
You can use the Shelly 2.5 and hook it to your garage door opener. It has 2 inputs that allow you to track current. So you can see when there is current passing through the motor and distinguish between Up/Down and best of all It sees when the door is triggered by HA, the wall button. car remotes, or the obstacle/laser sensor. It’s probably the most accurate way to track a door.
1 Like
With your logic, I do not see opening/closing when operating the door outside of HA, only when opening/closing within HA. Additionally, the closed contact sensor logic is backwards now and it only shows Closed when I remove the magnet from the bottom sensor after I’ve introduced it.
Righy. When you trigger the door outside of HA, its outside of HA, so thats to be expected. Did you remove the movement sensors? Lets try to get the basic functions working first.
How many contacts are on the reed switch? It should say on them NO, COM, NC. How are you wiring them? Are they both the same?
The reed switches are just two wire on/off and each are NO.
With a movement sensor defined as the inverse of the opposing contact sensor, I can detect opening/closing external to HA and the cover states behave correctly in HA:
Door open switch = on & Door closed switch = off: Open
Door open switch = off & Door closed switch =off: Closing %
Door open switch = off & Door closed switch =on: Closed
Door open switch = off & Door closed switch =off: Opening %
Door open switch = on & Door closed switch =off: Open
or
Door open switch = off & Door closed switch =on: Closed
Door open switch = off & Door closed switch =off: Opening %
Door open switch = on & Door closed switch =off: Open
Door open switch = off & Door closed switch =off: Closing %
Door open switch = off & Door closed switch =on: Closed
or
Door open switch = on & Door closed switch = off: Open
Door open switch = off & Door closed switch =off: Closing %
Door open switch = on & Door closed switch =off: Open
or
Door open switch = off & Door closed switch =on: Closed
Door open switch = off & Door closed switch =off: Opening %
Door open switch = off & Door closed switch =on: Closed
The key element was setting has_built_in_endstop: true so that the door motor switch was not activated when the cover presumed the door was open/closed which would have had adverse effects. But I do need the movement sensors for external feedback…
My latest work was this which changes how the light strip acts plus adds a pulse to the start of the ‘green’ light when in range:
light:
- platform: neopixelbus
variant: WS2812
pin: D8
num_leds: 30
type: grb
name: "Parking Light Indicator"
id: parking_light_indicator
restore_mode: ALWAYS_OFF
effects:
- pulse:
name: "Fast Pulse"
transition_length: 50ms
update_interval: 100ms
min_brightness: 0%
max_brightness: 100%
sensor:
- platform: ultrasonic
id: parking_sensor
trigger_pin: D1
echo_pin: D2
unit_of_measurement: "m"
accuracy_decimals: 1
update_interval: 1s
timeout: 4.0m
pulse_time: 10us
on_value_range:
- above: 1.85
then:
if:
condition:
binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
brightness: 100%
red: 100%
green: 0%
blue: 0%
- below: 1.85
above: 1.7
then:
if:
condition:
binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
brightness: 100%
red: 100%
green: 15%
blue: 0%
- below: 1.7
above: 1.55
then:
if:
condition:
binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
brightness: 100%
red: 100%
green: 30%
blue: 0%
- below: 1.55
above: 1.4
then:
if:
condition:
binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
brightness: 100%
red: 100%
green: 45%
blue: 0%
- below: 1.4
above: 1.25
then:
if:
condition:
binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
brightness: 100%
red: 100%
green: 60%
blue: 0%
- below: 1.25
above: 1.1
then:
if:
condition:
binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
brightness: 100%
red: 100%
green: 75%
blue: 0%
- below: 1.1
above: 0.7
then:
if:
condition:
binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
brightness: 100%
red: 100%
green: 90%
blue: 0%
- below: 0.7
above: 0.5
then:
if:
condition:
binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
brightness: 100%
red: 100%
green: 100%
blue: 0%
- below: 0.5
then:
if:
condition:
binary_sensor.is_on:
id: open_contact_sensor
then:
- light.turn_on:
id: parking_light_indicator
effect: Fast Pulse
brightness: 100%
red: 0%
green: 100%
blue: 0%
- delay : 1s
- light.turn_on:
id: parking_light_indicator
effect: none
brightness: 100%
red: 0%
green: 100%
blue: 0%
Plus I removed name: 'parking sensor'and filters: from the ultrasonic sensor and added a copy with a delta filter to reduce updates to HA:
- platform: copy
name: 'parking_sensor'
source_id: parking_sensor
filters:
- delta: 0.05
Oh ok, so theyre the pre-wired ones? Im honestly not sure the best way to track the cover from external triggers. If you use the configurable movement sensors it will probably show you “opening/closing” but your going to mess everything else up. Im not positive but, im pretty sure those movement_sensors are for actual sensors detecting movement and direction. They are for current covers where you would use the Analog threshold binary sensors sensing the motor current to detect movement, direction, and motor stop events.
The only thing i can think of if you must have opening/closing for external triggers is 1. Add an actual movement sensor like a current sensor or rotary encoder. 2. Your going to have to create some extra logic that watches for when an end_stop is On and then changes but not from the cover triggering it. So, door is Closed - closed endstop turns Off and cover != cover.open - then return Opening.
Have you considered just getting a Shelly2.5 instead? It has 2 channels for AC current monitoring and it has a switch/relay. This would do everything you want and do it really well.
Sorry i forgot i already mentioned the Shelly2.5
Thanks, I will definitively look at the Shelley 2.5!
On my bench, this is now working the way I want though.
Just added an on_boot setting:
esphome:
name: my-garage-door
friendly_name: My Garage Door
on_boot:
priority: 100 # Highest priority, ensures light turns off without delay.
then:
- light.turn_off:
id: parking_light_indicator
How is it handling external triggers?
Anything that opens the door outside HA (even manually opening it) triggers closed > opening > open (& vice-versa) via the movement sensors being inverse of the contact sensors.
But only if it starts at the open or closed endstop, right? Thats pretty much the reason i never took mine any further. If you open the door from the wall switch and then stoo it, the cover doesnt know you stppped it and it continues to show Opening untill the time limit is reached and i think it shows 99% open even if you stopped it 10" from closed position.
All this talking about garage doors has got me wanting to put a current sensor on mine and track it perfect in every situation. Ive got 1 CT clamp and gotta decide to get another one or scrap that and get a Shelly…
Yes, the opening/closing is a timed event which proceeds to 1% / 99% even if the door was stopped halfway by the wall switch. Without a current sensor on the motor or a real position tracking device there’s no way for the cover to know the exact state of the door between open & closed.
I finally have my WS2812 based LED bar w/30 LEDs working now.
Here are two videos: one of actual operation on my desk and the other is screen recording of the device in HA
Here’s the yaml:
esphome:
name: my-garage-door
friendly_name: My Garage Door
on_boot:
priority: 100
then:
- binary_sensor.template.publish:
id: open_movement_sensor
state: False
- binary_sensor.template.publish:
id: close_movement_sensor
state: False
- if:
condition:
binary_sensor.is_on:
id: open_contact_sensor
then:
light.turn_on:
id: parking_light_indicator
effect: Slow Pulse
brightness: 100%
red: 100%
green: 0%
blue: 0%
esp8266:
board: d1_mini
restore_from_flash: True
logger:
api:
encryption:
key: "<redacted>"
ota:
password: "<redacted>"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
ap:
ssid: "Distance-Sensor Fallback Hotspot"
password: "<redacted>"
captive_portal:
binary_sensor:
- platform: template
name: Vehicle
device_class: presence
lambda:
if (id(parking_sensor).state < id(yellow_trigger_level).state) {
return true;
} else {
return false;
}
- platform: gpio
pin:
number: D5
mode: INPUT_PULLUP
inverted: True
name: "is Open"
id: open_contact_sensor
disabled_by_default: True
internal: False
on_press:
- then:
- binary_sensor.template.publish:
id: open_movement_sensor
state: False
- binary_sensor.template.publish:
id: close_movement_sensor
state: False
- then:
- light.turn_on:
id: parking_light_indicator
effect: Slow Pulse
brightness: 50%
red: 100%
green: 0%
blue: 0%
on_release:
- binary_sensor.template.publish:
id: close_movement_sensor
state: True
- platform: template
name: "is Opening"
id: open_movement_sensor
disabled_by_default: True
on_press:
- light.turn_on:
id: parking_light_indicator
effect: Slow Pulse
brightness: 100%
red: 0%
green: 0%
blue: 100%
- platform: gpio
pin:
number: D6
mode: INPUT_PULLUP
inverted: True
name: "is Closed"
id: closed_contact_sensor
disabled_by_default: True
internal: False
on_press:
then:
- sensor.duty_time.stop: parking_light_duty_time
- light.turn_off:
id: parking_light_indicator
- binary_sensor.template.publish:
id: open_movement_sensor
state: False
- binary_sensor.template.publish:
id: close_movement_sensor
state: False
on_release:
- sensor.duty_time.reset: parking_light_duty_time
- binary_sensor.template.publish:
id: open_movement_sensor
state: True
- platform: template
name: "is Closing"
id: close_movement_sensor
disabled_by_default: True
on_press:
then:
- light.turn_on:
id: parking_light_indicator
effect: Slow Pulse
brightness: 100%
red: 85%
green: 25%
blue: 100%
cover:
- platform: feedback
name: "Garage Door"
id: endstop_cover
device_class: garage
has_built_in_endstop: True
max_duration: 12s
open_action:
- switch.turn_on: relay
open_duration: 10s
open_endstop: open_contact_sensor
open_sensor: open_movement_sensor
close_action:
- switch.turn_on: relay
close_duration: 10s
close_endstop: closed_contact_sensor
close_sensor: close_movement_sensor
stop_action:
- switch.turn_on: relay
light:
- platform: neopixelbus
variant: WS2812
pin: D8
num_leds: 30
type: grb
name: "Parking Light Indicator"
id: parking_light_indicator
restore_mode: ALWAYS_OFF
effects:
- pulse:
name: "Slow Pulse"
transition_length: 500ms
update_interval: 750ms
min_brightness: 0%
max_brightness: 100%
- pulse:
name: "Fast Pulse"
transition_length: 50ms
update_interval: 100ms
min_brightness: 0%
max_brightness: 100%
sensor:
- platform: duty_time
id: parking_light_duty_time
name: Parking Light Duty Time
update_interval: 1s
lambda: "return id(closed_contact_sensor).state == false;"
restore: false
last_time:
name: Parking Light Last Turn-On Time
on_value_range:
above: 60
then:
- light.turn_off: parking_light_indicator
- sensor.duty_time.stop: parking_light_duty_time
- platform: ultrasonic
id: parking_sensor
trigger_pin: D1
echo_pin: D2
unit_of_measurement: "m"
accuracy_decimals: 1
update_interval: 1s
timeout: 4.0m
pulse_time: 10us
filters:
- delta: .02
on_value:
then:
- if:
condition:
- binary_sensor.is_on: open_contact_sensor
- sensor.duty_time.is_running: parking_light_duty_time
then:
- if:
condition:
lambda: |-
return id(red_trigger_level).state < id(parking_sensor).state;
then:
- light.turn_on:
id: parking_light_indicator
effect: Slow Pulse
brightness: 100%
red: 100%
green: 0%
blue: 0%
- if:
condition:
lambda: |-
return (id(green_trigger_level).state < id(parking_sensor).state && id(parking_sensor).state < id(red_trigger_level).state);
then:
- light.turn_on:
id: parking_light_indicator
effect: none
brightness: 100%
red: !lambda |-
return ((id(parking_sensor).state - id(green_trigger_level).state) / (id(red_trigger_level).state - id(green_trigger_level).state));
green: !lambda |-
return ((id(red_trigger_level).state - id(parking_sensor).state) / (id(red_trigger_level).state - id(green_trigger_level).state));
blue: 0%
- if:
condition:
lambda: |-
return id(parking_sensor).state < id(green_trigger_level).state;
then:
- light.turn_on:
id: parking_light_indicator
effect: Fast Pulse
brightness: 100%
red: 0%
green: 100%
blue: 0%
- delay : 1s
- light.turn_on:
id: parking_light_indicator
effect: none
brightness: 100%
red: 0%
green: 100%
blue: 0%
- platform: copy
name: 'parking_sensor'
source_id: parking_sensor
filters:
- delta: 0.05
- platform: homeassistant
name: "Red Trigger Level"
id: "red_trigger_level"
entity_id: input_number.red_trigger_level
- platform: homeassistant
name: "Yellow Trigger Level"
id: "yellow_trigger_level"
entity_id: input_number.yellow_trigger_level
- platform: homeassistant
name: "Green Trigger Level"
id: "green_trigger_level"
entity_id: input_number.green_trigger_level
switch:
- platform: gpio
pin: D7
name: "Garage Door Relay"
id: relay
internal: False
# Toggle the relay with a 0.5s pulse simulating a manual button press
on_turn_on:
- delay : 500ms
- switch.turn_off: relay
time:
- platform: sntp
id: my_time
Note the duty_time sensor to turn off the light after a fixed time period after opening is case I leave the door open for an extended period. I am going to do more testing before boxing it up an installing it but it’s coming along nicely I think, finally!
Oh, here are the trigger level input numbers:

My new automation in HA…

alias: My Garage Door - "Stalled"
description: ""
trigger:
- platform: state
entity_id:
- binary_sensor.my_garage_door_is_closing
- binary_sensor.my_garage_door_is_opening
for:
hours: 0
minutes: 0
seconds: 20
to: "on"
condition: []
action:
- service: python_script.hass_entities
data:
action: set_state
entity_id: cover.my_garage_door_garage_door
state: Stalled
- service: python_script.hass_entities
data:
action: delete_attribute
entity_id: cover.my_garage_door_garage_door
attribute: current_position
mode: single
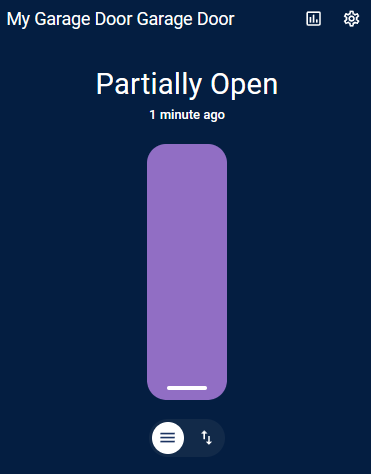
I changed my mind…
alias: My Garage Door - "Stalled"
description: ""
trigger:
- platform: state
entity_id:
- binary_sensor.my_garage_door_is_closing
for:
hours: 0
minutes: 0
seconds: 20
to: "on"
id: Closing
- platform: state
entity_id:
- binary_sensor.my_garage_door_is_opening
for:
hours: 0
minutes: 0
seconds: 20
to: "on"
id: Opening
condition: []
action:
- service: python_script.hass_entities
data:
action: delete_attribute
entity_id: cover.my_garage_door_garage_door
attribute: current_position
- choose:
- conditions:
- condition: trigger
id:
- Closing
sequence:
- service: python_script.hass_entities
data:
action: set_state
entity_id: cover.my_garage_door_garage_door
state: Partially Closed
- conditions:
- condition: trigger
id:
- Opening
sequence:
- service: python_script.hass_entities
data:
action: set_state
entity_id: cover.my_garage_door_garage_door
state: Partially Open
mode: single
I like the way you have this layed out, it looks good and very configurable.
I dont use the wall switch, i mostly use HA or the RF remote in the cars which the cover doesnt track either. I recently bought a 4 channel RF relay board really just to play with but, it gave me the idea to ditch the car RF remotes and use these these keychain RF transmitters. Each remote, the RF codes are different too so, i can tell which remote was used to trigger something or use the extra ones for something else… i couldnt find any modules with an esp board and rf receiver but a receiver could easily be added to one.
Thanks for the compliment. I rarely use the wall switch either and mostly use HA to open/close the door via car is leaving automation based on my phone connecting to car bluetooth & BT status update via HA companion app, car is in garage via the existing OpenGarage distance sensor and activation via MIMOlite Z-Wave momentary switch wired in parallel with wall switch, and arrival automation triggered by GPS location tracking arriving home, garage is empty & MIMOlite opening it. When my phone then disconnects from car bluetooth, the garage Alexa Echo asks if she should close the garage door, I say yes and she activates the MIMOlite to close the door.