Hello everyone, I need advice about reading discrete inputs in esphome modbus.
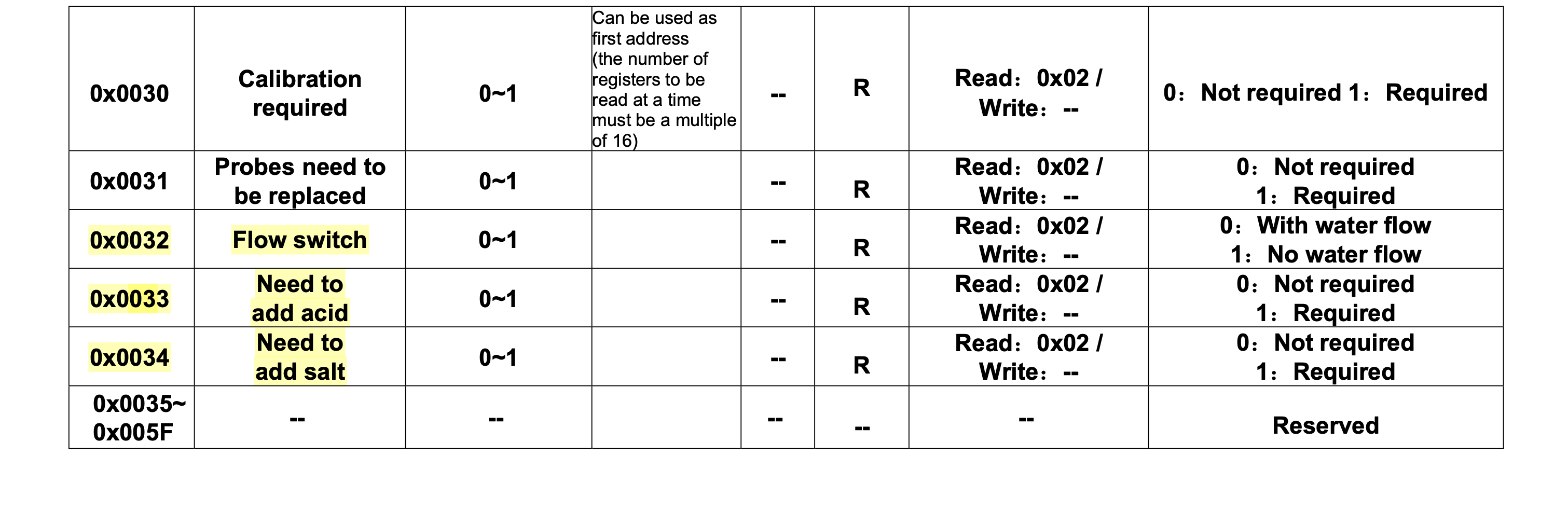
I need to read the address 0x0032 flow switch. The manufacturer wrote back to me: To read 0×0032, we need to change the address from 0×0032 to 0×0030 and then offset 2 bits to get the status of 0×0032. The first address must be 0×0030. But still it doesn’t work for me. Other things like read: 0x03, 0x04 and write: 0x06 work without a problem.
My configuration:
esphome:
name: mrpure
friendly_name: mr.pure
esp32:
board: m5stack-core-esp32
framework:
type: arduino
# Enable logging
logger:
baud_rate: 0
level: VERY_VERBOSE
hardware_uart: UART0
# Enable Home Assistant API
api:
encryption:
key: "80hPIY/FhlknBcKTO10mdqZGNunbcTUY/FCxnw+qkWQ="
ota:
- platform: esphome
password: "cecb0cf1db50c947dadc724f68bb37b6"
wifi:
ssid: !secret wifi2_ssid
password: !secret wifi2_password
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "Mrpure Fallback Hotspot"
password: "cvfC9jcUrqxI"
captive_portal:
web_server:
port: 80
uart:
id: mod_bus
rx_pin: 32
tx_pin: 26
baud_rate: 9600
data_bits: 8
parity: NONE
stop_bits: 1
rx_buffer_size: 256
modbus:
# flow_control_pin: GPIO4
id: modbus2
send_wait_time: 300ms
modbus_controller:
- id: mrpure
## the Modbus device addr
address: 0x0002
modbus_id: modbus2
update_interval: 15s
binary_sensor:
- platform: modbus_controller
modbus_controller_id: mrpure
name: "Flow"
id: prietok
icon: "mdi:check-circle"
register_type: discrete_input
address: 0x0030
byte_offset: 2
select:
- platform: modbus_controller
name: "PWP Operating Mode"
id: pwp_operating_mode
modbus_controller_id: mrpure
address: 0x0000
value_type: U_WORD
optionsmap:
"Shutdown": 0
"Auto mode": 1
"Shock mode": 2
number:
- platform: modbus_controller
modbus_controller_id: mrpure
name: "Nastavenie pH"
id: nastavenie_ph
register_type: holding
address: 0x0003
value_type: U_WORD
min_value: 720
max_value: 760
step: 10
mode: slider
lambda: "return x ;"
write_lambda: |-
ESP_LOGD("main", "Modbus Number incoming value = %f", x);
return x;
sensor:
- platform: modbus_controller
modbus_controller_id: mrpure
name: "pH"
id: ph_pool
icon: "mdi:ph"
register_type: read
device_class: "ph"
accuracy_decimals: 1
filters:
- lambda: return x /100;
address: 0x0001
value_type: U_WORD
- platform: modbus_controller
modbus_controller_id: mrpure
name: "ORP"
id: orp_pool
register_type: read
address: 0x0000
value_type: U_WORD
unit_of_measurement: "mV"
- platform: modbus_controller
modbus_controller_id: mrpure
name: "Electrical conductivity"
id: conductivity_pool
register_type: read
address: 0x0002
value_type: U_WORD
unit_of_measurement: "ppm"
- platform: modbus_controller
modbus_controller_id: mrpure
name: "Teplota bazén"
id: temperature_pool
register_type: read
device_class: "temperature"
state_class: "measurement"
accuracy_decimals: 2
filters:
- lambda: return x /10;
address: 0x0003
value_type: U_WORD
unit_of_measurement: "°C"
- platform: modbus_controller
modbus_controller_id: mrpure
name: "Chlorinator"
id: temperature_chlorine_pool
register_type: read
device_class: "temperature"
state_class: "measurement"
accuracy_decimals: 2
filters:
- lambda: return x /10;
address: 0x0004
value_type: U_WORD
unit_of_measurement: "°C"
- platform: modbus_controller
modbus_controller_id: mrpure
name: "Chlór produkcia"
id: production_chlorine_pool
register_type: read
address: 0x0005
value_type: U_WORD
unit_of_measurement: "%"
- platform: modbus_controller
modbus_controller_id: mrpure
name: "Kvalita vody"
id: water_quality_pool
register_type: read
address: 0x0006
value_type: U_WORD
- platform: modbus_controller
modbus_controller_id: mrpure
name: "Electrolytic current"
id: electrolytic_current_pool
register_type: read
address: 0x000B
value_type: U_WORD
unit_of_measurement: "A"
filters:
- lambda: return x /100;
- platform: modbus_controller
modbus_controller_id: mrpure
name: "Elektrolytic voltage"
id: electrolytic_voltage_pool
register_type: read
address: 0x000C
value_type: U_WORD
unit_of_measurement: "V"
filters:
- lambda: return x /100;
Log :
INFO ESPHome 2024.6.6
INFO Reading configuration /config/esphome/mrpure.yaml...
INFO Starting log output from 192.168.5.24 using esphome API
INFO Successfully connected to mrpure @ 192.168.5.24 in 0.125s
INFO Successful handshake with mrpure @ 192.168.5.24 in 0.084s
[09:51:20][I][app:100]: ESPHome version 2024.6.6 compiled on Jul 9 2024, 08:31:24
[09:51:20][C][wifi:599]: WiFi:
[09:51:20][C][wifi:427]: Local MAC: 64:B7:08:B8:5D:A0
[09:51:20][C][wifi:432]: SSID: 'garden'[redacted]
[09:51:20][C][wifi:435]: IP Address: 192.168.5.24
[09:51:20][C][wifi:439]: BSSID: BC:9F:E4:4B:98:A6[redacted]
[09:51:20][C][wifi:440]: Hostname: 'mrpure'
[09:51:20][C][wifi:442]: Signal strength: -65 dB ▂▄▆█
[09:51:20][V][wifi:444]: Priority: 0.0
[09:51:20][C][wifi:446]: Channel: 5
[09:51:20][C][wifi:447]: Subnet: 255.255.255.0
[09:51:20][C][wifi:448]: Gateway: 192.168.5.2
[09:51:20][C][wifi:449]: DNS1: 195.146.128.60
[09:51:20][C][wifi:450]: DNS2: 195.146.132.59
[09:51:20][C][logger:185]: Logger:
[09:51:20][C][logger:186]: Level: VERY_VERBOSE
[09:51:20][C][logger:188]: Log Baud Rate: 0
[09:51:20][C][logger:189]: Hardware UART: UART0
[09:51:20][C][uart.arduino_esp32:137]: UART Bus 0:
[09:51:20][C][uart.arduino_esp32:138]: TX Pin: GPIO26
[09:51:20][C][uart.arduino_esp32:139]: RX Pin: GPIO32
[09:51:20][C][uart.arduino_esp32:141]: RX Buffer Size: 256
[09:51:20][C][uart.arduino_esp32:143]: Baud Rate: 9600 baud
[09:51:20][C][uart.arduino_esp32:144]: Data Bits: 8
[09:51:20][C][uart.arduino_esp32:145]: Parity: NONE
[09:51:20][C][uart.arduino_esp32:146]: Stop bits: 1
[09:51:20][C][modbus:152]: Modbus:
[09:51:20][C][modbus:154]: Send Wait Time: 300 ms
[09:51:20][C][modbus:155]: CRC Disabled: NO
[09:51:20][C][modbus.number:083]: modbus.numberModbus Number 'Nastavenie pH'
[09:51:20][C][modbus_controller:341]: ModbusController:
[09:51:20][C][modbus_controller:342]: Address: 0x02
[09:51:20][C][modbus_controller:344]: sensormap
[09:51:20][C][modbus_controller:348]: Sensor type=2 start=0x30 offset=0x2 count=3 size=1
[09:51:20][C][modbus_controller:348]: Sensor type=3 start=0x0 offset=0x0 count=1 size=2
[09:51:20][C][modbus_controller:348]: Sensor type=3 start=0x3 offset=0x0 count=1 size=2
[09:51:20][C][modbus_controller:348]: Sensor type=4 start=0x0 offset=0x0 count=1 size=2
[09:51:20][C][modbus_controller:348]: Sensor type=4 start=0x0 offset=0x2 count=1 size=2
[09:51:20][C][modbus_controller:348]: Sensor type=4 start=0x0 offset=0x4 count=1 size=2
[09:51:20][C][modbus_controller:348]: Sensor type=4 start=0x0 offset=0x6 count=1 size=2
[09:51:20][C][modbus_controller:348]: Sensor type=4 start=0x0 offset=0x8 count=1 size=2
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensorModbus Controller Sensor 'Chlór produkcia'
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor State Class: ''
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor Unit of Measurement: '%'
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor Accuracy Decimals: 0
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensorModbus Controller Sensor 'Kvalita vody'
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor State Class: ''
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor Unit of Measurement: ''
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor Accuracy Decimals: 0
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensorModbus Controller Sensor 'Electrolytic current'
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor State Class: ''
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor Unit of Measurement: 'A'
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor Accuracy Decimals: 0
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensorModbus Controller Sensor 'Elektrolytic voltage'
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor State Class: ''
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor Unit of Measurement: 'V'
[09:51:20][C][modbus_controller.sensor:010]: modbus_controller.sensor Accuracy Decimals: 0
[09:51:20][C][captive_portal:088]: Captive Portal:
[09:51:20][C][web_server:173]: Web Server:
[09:51:20][C][web_server:174]: Address: mrpure.local:80
[09:51:20][C][mdns:115]: mDNS:
[09:51:20][C][mdns:116]: Hostname: mrpure
[09:51:20][V][mdns:117]: Services:
[09:51:20][V][mdns:119]: - _esphomelib, _tcp, 6053
[09:51:20][V][mdns:121]: TXT: friendly_name = mr.pure
[09:51:20][V][mdns:121]: TXT: version = 2024.6.6
[09:51:20][V][mdns:121]: TXT: mac = 64b708b85da0
[09:51:20][V][mdns:121]: TXT: platform = ESP32
[09:51:20][V][mdns:121]: TXT: board = m5stack-core-esp32
[09:51:20][V][mdns:121]: TXT: network = wifi
[09:51:20][V][mdns:121]: TXT: api_encryption = Noise_NNpsk0_25519_ChaChaPoly_SHA256
[09:51:20][V][mdns:119]: - _http, _tcp, 80
[09:51:20][C][esphome.ota:073]: Over-The-Air updates:
[09:51:20][C][esphome.ota:074]: Address: mrpure.local:3232
[09:51:20][C][esphome.ota:075]: Version: 2
[09:51:20][C][esphome.ota:078]: Password configured
[09:51:20][C][safe_mode:018]: Safe Mode:
[09:51:20][C][safe_mode:020]: Boot considered successful after 60 seconds
[09:51:20][C][safe_mode:021]: Invoke after 10 boot attempts
[09:51:20][C][safe_mode:023]: Remain in safe mode for 300 seconds
[09:51:20][C][api:139]: API Server:
[09:51:20][C][api:140]: Address: mrpure.local:6053
[09:51:20][C][api:142]: Using noise encryption: YES
[09:51:22][VV][scheduler:226]: Running interval '' with interval=10000 last_execution=1163712 (now=1173712)
[09:51:28][VV][scheduler:226]: Running interval 'update' with interval=15000 last_execution=1165538 (now=1180538)
[09:51:28][V][modbus_controller:224]: Updating modbus component
[09:51:28][VV][modbus_controller:228]: Updating range 0x30
[09:51:28][V][modbus_controller:191]: Range : 30 Size: 3 (2) skip: 0
[09:51:28][VV][modbus_controller:228]: Updating range 0x0
[09:51:28][V][modbus_controller:191]: Range : 0 Size: 1 (3) skip: 0
[09:51:28][VV][modbus_controller:228]: Updating range 0x3
[09:51:28][V][modbus_controller:191]: Range : 3 Size: 1 (3) skip: 0
[09:51:28][VV][modbus_controller:228]: Updating range 0x0
[09:51:28][V][modbus_controller:191]: Range : 0 Size: 7 (4) skip: 0
[09:51:28][VV][modbus_controller:228]: Updating range 0xB
[09:51:28][V][modbus_controller:191]: Range : B Size: 2 (4) skip: 0
[09:51:28][V][modbus_controller:044]: Sending next modbus command to device 2 register 0x30 count 3
[09:51:28][VV][uart.arduino_esp32:180]: Flushing...
[09:51:28][V][modbus:210]: Modbus write: 02.02.00.30.00.03.38.37 (8)
[09:51:28][V][modbus_controller:557]: Command sent 2 0x30 3
[09:51:29][V][modbus_controller:044]: Sending next modbus command to device 2 register 0x30 count 3
[09:51:29][VV][uart.arduino_esp32:180]: Flushing...
[09:51:29][V][modbus:210]: Modbus write: 02.02.00.30.00.03.38.37 (8)
[09:51:29][V][modbus_controller:557]: Command sent 2 0x30 3
[09:51:29][V][modbus_controller:044]: Sending next modbus command to device 2 register 0x30 count 3
[09:51:29][VV][uart.arduino_esp32:180]: Flushing...
[09:51:29][V][modbus:210]: Modbus write: 02.02.00.30.00.03.38.37 (8)
[09:51:29][V][modbus_controller:557]: Command sent 2 0x30 3
[09:51:29][V][modbus_controller:044]: Sending next modbus command to device 2 register 0x30 count 3
[09:51:29][VV][uart.arduino_esp32:180]: Flushing...
[09:51:29][V][modbus:210]: Modbus write: 02.02.00.30.00.03.38.37 (8)
[09:51:29][V][modbus_controller:557]: Command sent 2 0x30 3
[09:51:30][V][modbus_controller:044]: Sending next modbus command to device 2 register 0x30 count 3
[09:51:30][VV][uart.arduino_esp32:180]: Flushing...
[09:51:30][V][modbus:210]: Modbus write: 02.02.00.30.00.03.38.37 (8)
[09:51:30][V][modbus_controller:557]: Command sent 2 0x30 3
[09:51:30][W][modbus_controller:027]: Modbus device=2 set offline
[09:51:30][D][modbus_controller:040]: Modbus command to device=2 register=0x30 countdown=0 no response received - removed from send queue
[09:51:30][V][modbus_controller:044]: Sending next modbus command to device 2 register 0x00 count 1
[09:51:30][VV][uart.arduino_esp32:180]: Flushing...
[09:51:30][V][modbus:210]: Modbus write: 02.03.00.00.00.01.84.39 (8)
[09:51:30][V][modbus_controller:557]: Command sent 3 0x0 1
[09:51:30][V][modbus:042]: Modbus received Byte 2 (0X2)
[09:51:30][V][modbus:042]: Modbus received Byte 3 (0X3)
[09:51:30][V][modbus:042]: Modbus received Byte 2 (0X2)
[09:51:30][V][modbus:042]: Modbus received Byte 0 (0X0)
[09:51:30][V][modbus:042]: Modbus received Byte 2 (0X2)
[09:51:30][V][modbus:042]: Modbus received Byte 125 (0X7d)
[09:51:30][V][modbus:042]: Modbus received Byte 133 (0X85)
[09:51:30][W][modbus_controller:061]: Modbus device=2 back online
[09:51:30][V][modbus_controller:075]: Modbus response queued
[09:51:30][V][modbus_controller:083]: Process modbus response for address 0x0 size: 2
[09:51:30][V][modbus_controller:164]: data for register address : 0x0 :
[09:51:30][D][modbus_controller.select:014]: New select value 2 from payload
[09:51:30][V][modbus_controller.select:032]: Found option Shock mode for value 2
[09:51:30][D][select:015]: 'PWP Operating Mode': Sending state Shock mode (index 2)
[09:51:30][VV][api.service:278]: send_select_state_response: SelectStateResponse {
key: 647767940
state: 'Shock mode'
missing_state: NO
}
[09:51:30][V][modbus_controller:044]: Sending next modbus command to device 2 register 0x03 count 1
[09:51:30][VV][uart.arduino_esp32:180]: Flushing...
[09:51:30][V][modbus:210]: Modbus write: 02.03.00.03.00.01.74.39 (8)
[09:51:30][V][modbus_controller:557]: Command sent 3 0x3 1
[09:51:30][V][modbus:042]: Modbus received Byte 2 (0X2)
[09:51:30][V][modbus:042]: Modbus received Byte 3 (0X3)
[09:51:30][V][modbus:042]: Modbus received Byte 2 (0X2)
[09:51:30][V][modbus:042]: Modbus received Byte 2 (0X2)
[09:51:30][V][modbus:042]: Modbus received Byte 238 (0Xee)
[09:51:30][V][modbus:042]: Modbus received Byte 125 (0X7d)
[09:51:30][V][modbus:042]: Modbus received Byte 104 (0X68)
[09:51:30][V][modbus_controller:075]: Modbus response queued
[09:51:30][V][modbus_controller:083]: Process modbus response for address 0x3 size: 2
[09:51:30][V][modbus_controller:164]: data for register address : 0x3 :
[09:51:30][V][modbus.number:019]: Value overwritten by lambda
[09:51:30][D][modbus.number:023]: Number new state : 750.00
[09:51:30][D][number:012]: 'Nastavenie pH': Sending state 750.000000
[09:51:30][VV][api.service:260]: send_number_state_response: NumberStateResponse {
key: 3192872880
state: 750
missing_state: NO
}
[09:51:30][V][modbus_controller:044]: Sending next modbus command to device 2 register 0x00 count 7
[09:51:30][VV][uart.arduino_esp32:180]: Flushing...
[09:51:30][V][modbus:210]: Modbus write: 02.04.00.00.00.07.B1.FB (8)
[09:51:30][V][modbus_controller:557]: Command sent 4 0x0 7
[09:51:30][V][modbus:042]: Modbus received Byte 2 (0X2)
[09:51:30][V][modbus:042]: Modbus received Byte 4 (0X4)
[09:51:30][V][modbus:042]: Modbus received Byte 14 (0Xe)
[09:51:30][V][modbus:042]: Modbus received Byte 0 (0X0)
[09:51:30][V][modbus:042]: Modbus received Byte 0 (0X0)
[09:51:30][V][modbus:042]: Modbus received Byte 2 (0X2)
[09:51:30][V][modbus:042]: Modbus received Byte 218 (0Xda)
[09:51:30][V][modbus:042]: Modbus received Byte 17 (0X11)
[09:51:30][V][modbus:042]: Modbus received Byte 8 (0X8)
[09:51:30][V][modbus:042]: Modbus received Byte 1 (0X1)
[09:51:30][V][modbus:042]: Modbus received Byte 4 (0X4)
[09:51:30][V][modbus:042]: Modbus received Byte 1 (0X1)
[09:51:30][V][modbus:042]: Modbus received Byte 165 (0Xa5)
[09:51:30][V][modbus:042]: Modbus received Byte 0 (0X0)
[09:51:30][V][modbus:042]: Modbus received Byte 130 (0X82)
[09:51:30][V][modbus:042]: Modbus received Byte 0 (0X0)
[09:51:30][V][modbus:042]: Modbus received Byte 0 (0X0)
[09:51:30][V][modbus:042]: Modbus received Byte 115 (0X73)
[09:51:30][V][modbus:042]: Modbus received Byte 119 (0X77)
[09:51:30][V][modbus_controller:075]: Modbus response queued
[09:51:30][V][modbus_controller:083]: Process modbus response for address 0x0 size: 14
[09:51:30][V][modbus_controller:164]: data for register address : 0x0 :
[09:51:30][D][modbus_controller.sensor:025]: Sensor new state: 0.00
[09:51:30][V][sensor:043]: 'ORP': Received new state 0.000000
[09:51:30][D][sensor:094]: 'ORP': Sending state 0.00000 mV with 0 decimals of accuracy
[09:51:30][VV][api.service:140]: send_sensor_state_response: SensorStateResponse {
key: 595159798
state: 0
missing_state: NO
}
[09:51:30][D][modbus_controller.sensor:025]: Sensor new state: 730.00
[09:51:30][V][sensor:043]: 'pH': Received new state 730.000000
[09:51:30][VV][sensor.filter:014]: Filter(0x3ffb975c)::input(730.000000)
[09:51:30][VV][sensor.filter:286]: LambdaFilter(0x3ffb975c)::new_value(730.000000) -> 7.300000
[09:51:30][VV][sensor.filter:021]: Filter(0x3ffb975c)::output(7.300000) -> SENSOR
[09:51:30][D][sensor:094]: 'pH': Sending state 7.30000 with 1 decimals of accuracy
[09:51:30][VV][api.service:140]: send_sensor_state_response: SensorStateResponse {
key: 1635194325
state: 7.3
missing_state: NO
}
[09:51:30][D][modbus_controller.sensor:025]: Sensor new state: 4360.00
[09:51:30][V][sensor:043]: 'Electrical conductivity': Received new state 4360.000000
[09:51:30][D][sensor:094]: 'Electrical conductivity': Sending state 4360.00000 ppm with 0 decimals of accuracy
[09:51:30][VV][api.service:140]: send_sensor_state_response: SensorStateResponse {
key: 3034025029
state: 4360
missing_state: NO
}
[09:51:30][VV][api.service:140]: send_sensor_state_response: SensorStateResponse {
key: 1675265950
state: 42.1
missing_state: NO
}
[09:51:30][D][modbus_controller.sensor:025]: Sensor new state: 130.00
[09:51:30][V][sensor:043]: 'Chlór produkcia': Received new state 130.000000
[09:51:30][D][sensor:094]: 'Chlór produkcia': Sending state 130.00000 % with 0 decimals of accuracy
[09:51:30][VV][api.service:140]: send_sensor_state_response: SensorStateResponse {
key: 2219823522
state: 130
missing_state: NO
}
[09:51:30][D][modbus_controller.sensor:025]: Sensor new state: 0.00
[09:51:30][V][sensor:043]: 'Kvalita vody': Received new state 0.000000
[09:51:30][D][sensor:094]: 'Kvalita vody': Sending state 0.00000 with 0 decimals of accuracy
[09:51:30][VV][api.service:140]: send_sensor_state_response: SensorStateResponse {
key: 2021095314
state: 0
missing_state: NO
}
[09:51:30][V][modbus_controller:044]: Sending next modbus command to device 2 register 0x0B count 2
[09:51:30][VV][uart.arduino_esp32:180]: Flushing...
[09:51:30][V][modbus:210]: Modbus write: 02.04.00.0B.00.02.00.3A (8)
[09:51:30][V][modbus_controller:557]: Command sent 4 0xB 2
[09:51:30][V][modbus:042]: Modbus received Byte 2 (0X2)
[09:51:30][V][modbus:042]: Modbus received Byte 4 (0X4)
[09:51:30][V][modbus:042]: Modbus received Byte 4 (0X4)
[09:51:30][V][modbus:042]: Modbus received Byte 2 (0X2)
[09:51:30][V][modbus:042]: Modbus received Byte 186 (0Xba)
[09:51:30][V][modbus:042]: Modbus received Byte 3 (0X3)
[09:51:30][V][modbus:042]: Modbus received Byte 165 (0Xa5)
[09:51:30][V][modbus:042]: Modbus received Byte 40 (0X28)
[09:51:30][V][modbus:042]: Modbus received Byte 82 (0X52)
[09:51:30][V][modbus_controller:075]: Modbus response queued
[09:51:30][V][modbus_controller:083]: Process modbus response for address 0xB size: 4
[09:51:30][V][modbus_controller:164]: data for register address : 0xB :
[09:51:30][D][modbus_controller.sensor:025]: Sensor new state: 698.00
[09:51:30][V][sensor:043]: 'Electrolytic current': Received new state 698.000000
[09:51:30][VV][sensor.filter:014]: Filter(0x3ffb3660)::input(698.000000)
[09:51:30][VV][sensor.filter:286]: LambdaFilter(0x3ffb3660)::new_value(698.000000) -> 6.980000
[09:51:30][VV][sensor.filter:021]: Filter(0x3ffb3660)::output(6.980000) -> SENSOR
[09:51:32][VV][scheduler:226]: Running interval '' with interval=10000 last_execution=1173712 (now=1183712)