arganto
September 17, 2022, 4:25pm
43
This is possible in defining e.g. a template vacuum. But I don’t like this, because of some limitations. And this one is then not connected to the device created above, because it is not possible to link yaml-entities to devices. Unfortunately.
- platform: template
vacuums:
mahroboter_husqvarna_330x:
friendly_name: "Mähroboter Husqvarna 330x"
unique_id: unique_id_mahroboter_husqvarna_330x
value_template: |
{% if is_state("sensor.mahroboter_status_raw", "0") %}
idle
{% elif is_state("sensor.mahroboter_status_raw", "1") %}
docked
{% elif is_state("sensor.mahroboter_status_raw", "2") %}
cleaning
{% elif is_state("sensor.mahroboter_status_raw", "3") %}
returning
{% elif is_state("sensor.mahroboter_status_raw", "4") %}
docked
{% elif is_state("sensor.mahroboter_status_raw", "5") %}
cleaning
{% elif is_state("sensor.mahroboter_status_raw", "7") %}
error
{% elif is_state("sensor.mahroboter_status_raw", "8") %}
error
{% elif is_state("sensor.mahroboter_status_raw", "16") %}
docked
{% elif is_state("sensor.mahroboter_status_raw", "17") %}
docked
{% elif is_state("sensor.mahroboter_status_raw", "18") %}
idle
{% else %}
error
{% endif %}
battery_level_template: "{{ states('sensor.mahroboter_batterie')|int(default=0) }}"
start:
service: script.rasenmahersteuerung_robonect
data:
message: start
stop:
service: script.rasenmahersteuerung_robonect
data:
message: stop
return_to_base:
service: script.rasenmahersteuerung_robonect
data:
message: eod
locate:
service: script.rasenmahersteuerung_robonect
data:
message: auto
attribute_templates:
substatus: "{{ states('sensor.mahroboter_substatus_raw') }}: {{ states('sensor.mahroboter_substatus_plain') }}"
status: "{{ states('sensor.mahroboter_status_raw') }}: {{ states('sensor.mahroboter_status_plain') }}"
Thanks for that script, @arganto . It is such a nice way to integrate the mower into HA.
I’m further looking for a good way to control two things:
I would like to be able to set the mower mode
I would like to send an adhoc mowing job to my mower like in the robonect UI. Does anyone have an idea, how to to this from the HA UI? First step could be to send a fix job starting from now for 1 hour. Second step could be, to caonfigure an individuel input for the duration of the job starting by now.
You have to define template sensors, e.g.
- sensor:
- name: Mähroboter Modus lesbar
unique_id: unique_id_mahroboter_modus_lesbar
state: >
{% if is_state("sensor.mahroboter_modus_raw", "0") %}
Automatik
{% elif is_state("sensor.mahroboter_modus_raw", "1") %}
Manuell
{% elif is_state("sensor.mahroboter_modus_raw", "2") %}
Home
{% elif is_state("sensor.mahroboter_modus_raw", "3") %}
Demo
{% else %}
Versuche herauszufinden was {{ states("sensor.mahroboter_modus_raw") }} bedeutet
{% endif %}
icon: mdi:state-machine
- sensor:
- name: Mähroboter Status lesbar
unique_id: unique_id_mahroboter_status_lesbar
state: >
{% if is_state("sensor.mahroboter_status_raw", "0") %}
Erkenne Status
{% elif is_state("sensor.mahroboter_status_raw", "1") %}
Parkt
{% elif is_state("sensor.mahroboter_status_raw", "2") %}
Mäht
{% elif is_state("sensor.mahroboter_status_raw", "3") %}
Fährt heim
{% elif is_state("sensor.mahroboter_status_raw", "4") %}
Lädt
{% elif is_state("sensor.mahroboter_status_raw", "5") %}
Sucht
{% elif is_state("sensor.mahroboter_status_raw", "7") %}
Fehler
{% elif is_state("sensor.mahroboter_status_raw", "8") %}
Schleifensignal verloren
{% elif is_state("sensor.mahroboter_status_raw", "16") %}
Aus
{% elif is_state("sensor.mahroboter_status_raw", "17") %}
Schläft
{% elif is_state("sensor.mahroboter_status_raw", "18") %}
Wartet_auf_Garagentor
{% else %}
Versuche herauszufinden was {{ states("sensor.mahroboter_status_raw") }} bedeutet
{% endif %}
icon: mdi:list-status
1 Like
For ad-hoc start, I have defined a rest-sensor
rest_command:
start_husqvarna_330x5:
url: "http://xxx.xxx.xxx.xxx/xml?cmd=mode&mode=job&duration={{ duration }}&remotestart={{ remotestart }}&after=auto"
method: POST
username: !secret robonect_username
password: !secret robonect_password
And the call it vias this service with parameters, like last call here. In this whole scipts you can find further calls and topics as well:
alias: Rasenmähersteuerung Robonect
sequence:
- choose:
- conditions:
- condition: template
value_template: "{{ message == 'start' }}"
sequence:
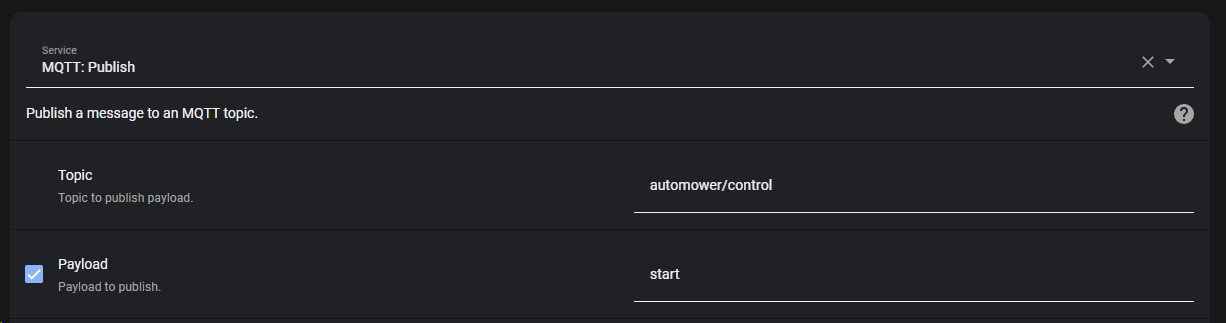
- service: mqtt.publish
data:
topic: automower/control
payload: start
- conditions:
- condition: template
value_template: "{{ message == 'stop' }}"
sequence:
- service: mqtt.publish
data:
topic: automower/control
payload: stop
- conditions:
- condition: template
value_template: "{{ message == 'home' }}"
sequence:
- service: input_select.select_option
target:
entity_id: input_select.mahroboter_gesetzter_modus
data:
option: Dauerparken
- service: mqtt.publish
data:
topic: automower/control/mode
payload: home
- conditions:
- condition: template
value_template: "{{ message == 'eoj' }}"
sequence:
- service: input_select.select_option
target:
entity_id: input_select.mahroboter_gesetzter_modus
data:
option: Jobende
- service: mqtt.publish
data:
topic: automower/control/mode
payload: home
- wait_for_trigger:
- platform: state
entity_id: sensor.mahroboter_status_raw
to: "4"
for:
hours: 0
minutes: 0
seconds: 5
enabled: true
- platform: state
entity_id: sensor.mahroboter_status_raw
to: "17"
for:
hours: 0
minutes: 0
seconds: 5
enabled: true
enabled: false
continue_on_timeout: false
- wait_template: |-
{{ states("sensor.mahroboter_nachster_start_datum") >
strptime(states("sensor.date_time"), "%Y-%m-%d,
%H:%M").date()|string
or (states("sensor.mahroboter_nachster_start_uhrzeit") != "00:00:00"
and as_local(strptime(states("sensor.date_time"), "%Y-%m-%d, %H:%M"))+timedelta(hours = 0, minutes = 30)
> as_datetime(states("sensor.mahroboter_nachster_start_datum")+"T"+states("sensor.mahroboter_nachster_start_uhrzeit")+"+02:00")
)
}}
continue_on_timeout: false
enabled: false
- delay:
hours: 3
minutes: 0
seconds: 0
milliseconds: 0
- service: input_select.select_option
target:
entity_id: input_select.mahroboter_gesetzter_modus
data:
option: Automatik
- service: mqtt.publish
data:
topic: automower/control/mode
payload: auto
- conditions:
- condition: template
value_template: "{{ message == 'eod' }}"
sequence:
- service: input_select.select_option
target:
entity_id: input_select.mahroboter_gesetzter_modus
data:
option: Tagesende
- service: mqtt.publish
data:
topic: automower/control/mode
payload: eod
- conditions:
- condition: template
value_template: "{{ message == 'auto' }}"
sequence:
- service: input_select.select_option
target:
entity_id: input_select.mahroboter_gesetzter_modus
data:
option: Automatik
- service: mqtt.publish
data:
topic: automower/control/mode
payload: auto
- conditions:
- condition: template
value_template: "{{ message == 'job' }}"
sequence:
- service: rest_command.start_husqvarna_330x5
data:
remotestart: "{{ remotestart }}"
duration: "{{ duration }}"
mode: restart
icon: mdi:robot-mower
and inside UI I call this script via service-calls, like
tap_action:
action: call-service
service: script.rasenmahersteuerung_robonect
service_data:
message: eoj
or
tap_action:
action: |
[[[
if (states["sensor.mahroboter_status_raw"].state == "100"
|| states["sensor.mahroboter_status_raw"].state == "4"
|| states["sensor.mahroboter_status_raw"].state == "16"
|| states["sensor.mahroboter_status_raw"].state == "17"
)
return "call-service";
else
return "none";
]]]
service: script.rasenmahersteuerung_robonect
service_data:
message: job
remotestart: '4'
duration: 90
haptic: success
1 Like
OK, but the new sensor will not be connected to the MQTT Device, right?
Found here a thread where the possible controls via mqtt are descriped. Will try to use them.
Right. Unfortunately, not.
Regarding the services: Yes, but you can not use mqtt for everything. I used it in the script above, where it is possible. Just double-check. In other cases, you have to use the rest call, like the “Fernstart” and Duration.
The plain-Status is not as you want to have, because there are to many (with e.g. added meters in text in way to start and home station, etc.). You will see.
BTW The above calls come in my case from an own card build with stacks and button-cards. Yes it is in style of an available vacuum-card, but as this was not able to do, what I want, I created this own one from scratch. Including the picture, which is of course moving, if mower is moving.
The 1, 2, 3 ar starting ad-hoc at different starting positions. Start and Stop are clear and Home is setting the status in another popup
But you can see, that the execution for all of them is bundled in the script above.
2 Likes
That looks rearly great! This is, what I want to reach
It has to be defined in the configuration.yaml
Thats a part of my configuration.yaml
automation: !include automations.yaml
script: !include scripts.yaml
scene: !include scenes.yaml
sensor: !include_dir_merge_list sensor/
binary_sensor: !include_dir_merge_list sensor_binary/
template: !include template.yaml
In the folder “sensor” I’ve got severel *.yaml files. For yiur Rest-Sensor i created a new file called rest.yaml in my sensor folder.
- rest_command:
start_gardena_r40li:
url: "http://192.168.178.33/xml?cmd=mode&mode=job&duration={{ duration }}&remotestart={{ remotestart }}&after=auto"
method: POST
username: !secret robonect_username
password: !secret robonect_password
The configartion check gives me this error message:
Invalid config for [sensor]: required key not provided @ data['platform']. Got None
Where is my mistake?
It’s not a sensor. It is a rest_command. So it needs to be in the root as sensor: group: switch: etc. And don’t invent different indents. My example is correct.
arganto:
BTW The above calls come in my case from an own card build with stacks and button-cards. Yes it is in style of an available vacuum-card, but as this was not able to do, what I want, I created this own one from scratch. Including the picture, which is of course moving, if mower is moving.
Would you Share youre UI yaml Code?
1 Like
Here is my first attempt for a simple mower card. For sure, it will neet some more styling, designing and some dynamic content. But for the first try an my current knowlege it’s ok.@arganto . That works great. Thanks al lot!
type: custom:stack-in-card
title: Mähroboter
mode: vertical
cards:
- type: horizontal-stack
cards:
- type: entity
entity: sensor.mahroboter_status_lesbar
name: Status
state_color: false
icon: none
- type: entity
entity: sensor.mahroboter_modus_lesbar
name: Modus
state_color: false
icon: none
- type: entity
entity: sensor.mahroboter_batterie
name: Batterie
state_color: false
icon: none
- type: horizontal-stack
cards:
- type: entity
entity: sensor.mahroboter_messerqualitat
name: Messer
- type: entity
entity: sensor.mahroboter_im_aktuellen_status
name: Status seit
unit: min
- type: entity
entity: sensor.mahroboter_betriebsstunden
name: Betrieb
unit: ' h'
state_color: false
- type: horizontal-stack
cards:
- type: custom:button-card
icon: mdi:home
tap_action:
action: call-service
service: script.rasenmaehersteuerung_robonect
service_data:
message: home
- type: custom:button-card
icon: mdi:play
tap_action:
action: call-service
service: script.rasenmaehersteuerung_robonect
service_data:
message: start
- type: custom:button-card
icon: mdi:stop
tap_action:
action: call-service
service: script.rasenmaehersteuerung_robonect
service_data:
message: stop
- type: custom:button-card
icon: mdi:pause
tap_action:
action: call-service
service: script.rasenmaehersteuerung_robonect
service_data:
message: eod
- type: custom:button-card
icon: mdi:clock-start
tap_action:
action: call-service
service: script.rasenmaehersteuerung_robonect
service_data:
message: job
duration: 200
remotestart: 0
011V32
April 27, 2023, 6:47pm
56
Why you don’t make an HACS integration? (Would be great
1 Like
kimc
May 6, 2023, 4:43pm
57
Anyone know if it is possible and what to publish to MQTT to do a remote start?
AFAIK not possible. See REST API examples above instead.
automower/control
and you have start & stop as payload possibilities
I’ll try to find some time this week and create an integration for HA
Have created a discord server where I will push updates and where things can be easily discussed
1 Like
But no start with starting point, duration, etc. Think that was the question and was the reason for my reply.
1 Like





 )
)