Hi all,
Based on all the good work done by many others previously, I have expanded on the HomeKit implementation for Roborock vacuum cleaners. This has only been tested on my Roborock S7 MaxV, but I assume will work on any others that share these common commands.
You will need both the Roborock and HomeKit integrations installed, and your Roborock integration configured and working through Home Assistant.
These scripts can be added to your configuration.yaml file. It will set up a range of switches that should all be exposed to Apple Home via a single HomeKit bridge that you can add to your Apple Home. These include:
- A HomeKit bridge for Roborock
- A ‘fan’ switch for each room configured.
- This can be used as a simple on/off switch to start cleaning the pre-configured ‘room’. (on = clean, off = pause).
- The fan setting allows you to set/change the suction used for each ‘room’.
- An on/off switch that can be used to pause the vacuum (on = pause, off = resume)
- An on/off switch to return the vacuum to the dock (on = return, off = pause)
- A ‘fan’ switch that sets the mop mode
- A ‘fan’ switch that sets the mop intensity
When configured, it should look like this:
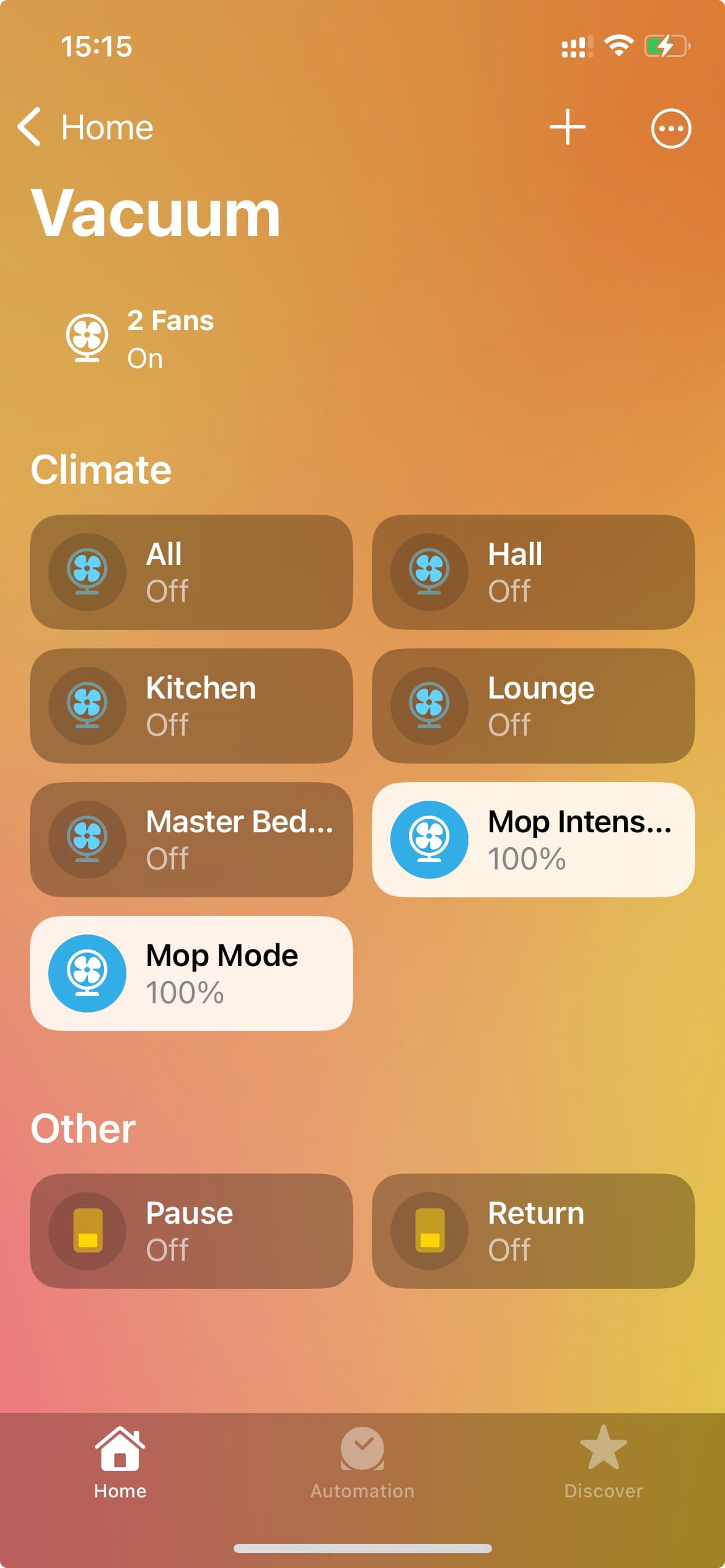
I have put comments in the code to help you configure it.
- You will need to replace “roborock_s7_maxv” (which is my vacuum) with the name used in HA for your vacuum.
- I have only included a single room (Lounge) and ‘set of rooms’ (All) from my implementation.
- You will also need to replicate the various routines and rename them per room to suit your needs.
- Also remember to replace the various ‘room numbers’ with those relevant to your set up.
I hope this is of interest to some!
Macdownunder
## Code to be added to configuration.yaml
## Developed by Macdownunder using Roborock and HomeKit integrations
##
## NB: You will need to replace "roborock_s7_maxv" (which is my vacuum) with the name used in HA for your vacuum.
## I have only included a single room (Lounge) and 'set of rooms' (All) from my implementation.
## You will also need to replicate the various routines and rename them per room to suit your needs.
## Also remember to replace the various 'room numbers' with those relevant to your set up.
switch:
- platform: template
switches:
# This makes an on/off switch to return the vacuum to the dock (off pauses the return)
return_vacuum_to_dock:
friendly_name: "Roborock Return to Dock"
value_template: >
{{ states('vacuum.roborock_s7_maxv') in ['returning', 'docking'] }}
turn_on:
- service: script.roborock_clear_booleans
- service: vacuum.return_to_base
target:
entity_id: vacuum.roborock_s7_maxv
turn_off:
- service: vacuum.pause
target:
entity_id: vacuum.roborock_s7_maxv
# This makes an on/off switch to pause the vacuum (off send the resume command to the vacuum)
roborock_pause_resume:
friendly_name: "Roborock Pause/Resume"
value_template: >
{{ is_state('vacuum.roborock_s7_maxv', 'paused') }}
turn_on:
service: vacuum.pause
target:
entity_id: vacuum.roborock_s7_maxv
turn_off:
service: vacuum.start
target:
entity_id: vacuum.roborock_s7_maxv
script:
# Script to commence cleaning a room at the desired suction level (per room)
roborock_clean_or_resume_lounge:
alias: "Clean or Resume Lounge"
sequence:
- choose:
- conditions:
- condition: state
entity_id: vacuum.roborock_s7_maxv
state: paused
sequence:
- service: vacuum.start
entity_id: vacuum.roborock_s7_maxv
- conditions:
- condition: state
entity_id: vacuum.roborock_s7_maxv
state: docked
sequence:
- service: vacuum.set_fan_speed
data:
entity_id: vacuum.roborock_s7_maxv
fan_speed: >
{% set p = (states('input_number.roborock_lounge_suction') | int // 20) * 20 %}
{% if p == 20 %} quiet
{% elif p == 40 %} balanced
{% elif p == 60 %} turbo
{% elif p == 80 %} max
{% else %} max_plus
{% endif %}
- delay: "00:00:01"
- service: vacuum.send_command
data:
entity_id: vacuum.roborock_s7_maxv
command: app_segment_clean
params: [22] ########### you will need to change this to your required room number(s)
roborock_clean_or_resume_all:
alias: "Clean or Resume All"
sequence:
- choose:
- conditions:
- condition: state
entity_id: vacuum.roborock_s7_maxv
state: paused
sequence:
- service: vacuum.start
entity_id: vacuum.roborock_s7_maxv
- conditions:
- condition: state
entity_id: vacuum.roborock_s7_maxv
state: docked
sequence:
- service: vacuum.set_fan_speed
data:
entity_id: vacuum.roborock_s7_maxv
fan_speed: >
{% set p = (states('input_number.roborock_all_suction') | int // 20) * 20 %}
{% if p == 20 %} quiet
{% elif p == 40 %} balanced
{% elif p == 60 %} turbo
{% elif p == 80 %} max
{% else %} max_plus
{% endif %}
- delay: "00:00:01"
- service: vacuum.send_command
data:
entity_id: vacuum.roborock_s7_maxv
command: app_segment_clean
params: [19, 17, 18, 21, 20, 22, 16, 23] ########### you will need to change this to your required room number(s)
# This is a routine to set all the room boolean to off (used to keep track of which room is active). To allow the HomeKit switch logic work.
roborock_clear_booleans:
alias: "Clear Roborock Room Flags"
sequence:
- service: input_boolean.turn_off
target:
entity_id:
- input_boolean.roborock_lounge_active
- input_boolean.roborock_all_active
automation:
# These are required to allow the suction settings to change during operation - per room/fan switch
- alias: "Update suction while cleaning - Lounge"
trigger:
- platform: state
entity_id: input_number.roborock_lounge_suction
condition:
- condition: state
entity_id: vacuum.roborock_s7_maxv
state: cleaning
action:
- service: vacuum.set_fan_speed
data:
entity_id: vacuum.roborock_s7_maxv
fan_speed: >
{% set p = (states('input_number.roborock_lounge_suction') | int // 20) * 20 %}
{% if p == 20 %} quiet
{% elif p == 40 %} balanced
{% elif p == 60 %} turbo
{% elif p == 80 %} max
{% else %} max_plus
{% endif %}
- alias: "Update suction while cleaning - All"
trigger:
- platform: state
entity_id: input_number.roborock_all_suction
condition:
- condition: state
entity_id: vacuum.roborock_s7_maxv
state: cleaning
action:
- service: vacuum.set_fan_speed
data:
entity_id: vacuum.roborock_s7_maxv
fan_speed: >
{% set p = (states('input_number.roborock_all_suction') | int // 20) * 20 %}
{% if p == 20 %} quiet
{% elif p == 40 %} balanced
{% elif p == 60 %} turbo
{% elif p == 80 %} max
{% else %} max_plus
{% endif %}
# This sets all the room boolean to off when the vacuum docks (ie at end of cleaning)
- alias: Reset Roborock active rooms on stop
trigger:
- platform: state
entity_id: vacuum.roborock_s7_maxv
to:
- 'docked'
action:
- service: script.roborock_clear_booleans
fan:
- platform: template
fans:
# This sets up a 'fan' switch for each room/group of groups, and calls the suction level input from the fan setting.
roborock_clean_lounge:
friendly_name: "Roborock Lounge"
value_template: "{{ is_state('input_boolean.roborock_lounge_active', 'on') }}"
percentage_template: "{{ states('input_number.roborock_lounge_suction') | int }}"
turn_on:
- service: script.roborock_clear_booleans
- service: script.roborock_clean_or_resume_lounge
- service: input_boolean.turn_on
target:
entity_id: input_boolean.roborock_lounge_active
turn_off:
- service: vacuum.pause
target:
entity_id: vacuum.roborock_s7_maxv
- service: input_boolean.turn_off
target:
entity_id: input_boolean.roborock_lounge_active
set_percentage:
- service: input_number.set_value
data:
entity_id: input_number.roborock_lounge_suction
value: "{{ percentage }}"
roborock_clean_all:
friendly_name: "Roborock ALL"
value_template: "{{ is_state('input_boolean.roborock_all_active', 'on') }}"
percentage_template: "{{ states('input_number.roborock_all_suction') | int }}"
turn_on:
- service: script.roborock_clear_booleans
- service: script.roborock_clean_or_resume_all
- service: input_boolean.turn_on
target:
entity_id: input_boolean.roborock_all_active
turn_off:
- service: vacuum.pause
target:
entity_id: vacuum.roborock_s7_maxv
- service: input_boolean.turn_off
target:
entity_id: input_boolean.roborock_all_active
set_percentage:
- service: input_number.set_value
data:
entity_id: input_number.roborock_all_suction
value: "{{ percentage }}"
# This sets up a 'fan' switch that allows you to select the mop mode
roborock_mop_mode:
friendly_name: "Roborock Mop Mode"
value_template: "{{ not is_state('select.roborock_s7_maxv_mop_mode', 'off') }}"
percentage_template: >
{% set mode = states('select.roborock_s7_maxv_mop_mode') %}
{% if mode == 'standard' %}
25
{% elif mode == 'deep' %}
50
{% elif mode == 'custom' %}
75
{% elif mode == 'deep_plus' %}
100
{% else %}
0
{% endif %}
turn_on:
- service: select.select_option
data:
entity_id: select.roborock_s7_maxv_mop_mode
option: standard
turn_off:
- service: select.select_option
data:
entity_id: select.roborock_s7_maxv_mop_mode
option: standard
set_percentage:
- service: select.select_option
data:
entity_id: select.roborock_s7_maxv_mop_mode
option: >
{% if percentage | int <= 25 %}
standard
{% elif percentage | int <= 50 %}
deep
{% elif percentage | int <= 75 %}
custom
{% else %}
deep_plus
{% endif %}
speed_count: 4
# This sets up a 'fan' switch that allows you to select the mop intensity
roborock_mop_intensity:
friendly_name: "Roborock Mop Intensity"
value_template: >
{{ not is_state('select.roborock_s7_maxv_mop_intensity', 'off') }}
percentage_template: >
{% set mode = states('select.roborock_s7_maxv_mop_intensity') %}
{% if mode == 'mild' %}
33
{% elif mode == 'moderate' %}
66
{% elif mode == 'intense' %}
100
{% else %}
0
{% endif %}
turn_on:
- service: select.select_option
data:
entity_id: select.roborock_s7_maxv_mop_intensity
option: mild
turn_off:
- service: select.select_option
data:
entity_id: select.roborock_s7_maxv_mop_intensity
option: off
set_percentage:
- service: select.select_option
data:
entity_id: select.roborock_s7_maxv_mop_intensity
option: >
{% if percentage | int <= 33 %}
mild
{% elif percentage | int <= 66 %}
moderate
{% else %}
intense
{% endif %}
speed_count: 3
# Set up inputs to hold the fan switch settings
input_number:
roborock_lounge_suction:
name: Suction Level Lounge
min: 20
max: 100
step: 20
mode: slider
initial: 100
roborock_all_suction:
name: Suction Level All
min: 20
max: 100
step: 20
mode: slider
initial: 100
# Set up booleans to identify active rooms
input_boolean:
roborock_lounge_active:
name: Roborock Lounge Active
initial: off
roborock_all_active:
name: Roborock All Active
initial: off
# Set up HomeKit integration bridge containing all entities to be exposed to HomeKit
homekit:
- name: Roborock
port: 51828
filter:
include_entities:
- switch.return_vacuum_to_dock
- switch.roborock_pause_resume
- fan.roborock_clean_all
- fan.roborock_clean_lounge
- fan.roborock_mop_intensity
- fan.roborock_mop_mode