I’m having a heck of a time trying to set up Frigate.
My HA is in a Proxmox VM. I’ve installed MQTT and the broker. My camera is an Amcrest and is set up (I already use Blue Iris). It’s showing in HA Entities. Frigate NVR (Full Access) addon is installed. I’ve added frigate.yml to config and added camera and MQTT info. No matter what I do I can’t integrate Frigate. I keep getting, “Failed to connect”. I’ve tried so many things that I forget where I am. Very frustrating.
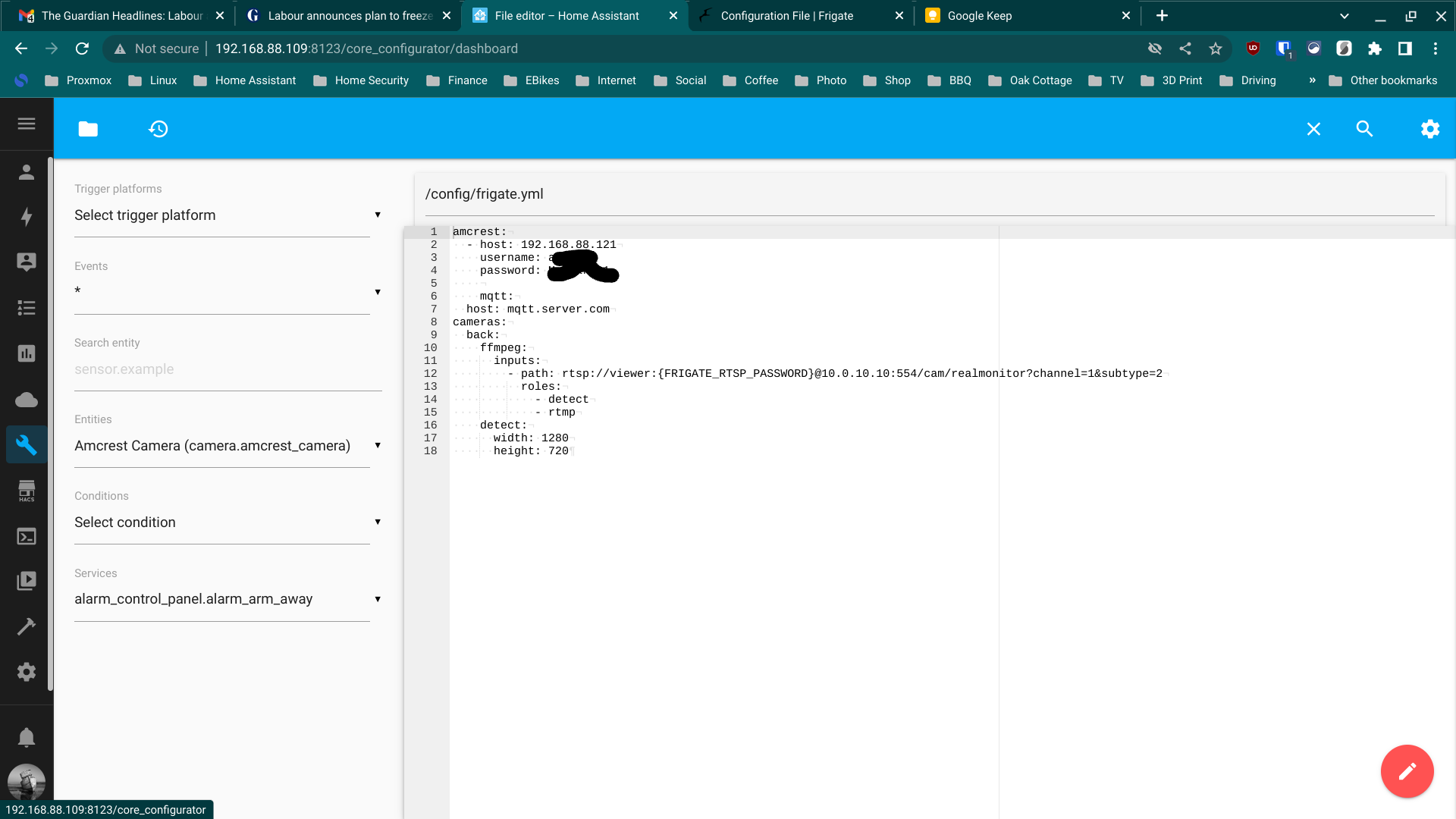
I’ll include below my log from the Frigate addon and some screenshots of my setup. Could someone take a look and, perhaps, tell me where I’m screwing up?
Here’s the Frigate log:
[s6-init] making user provided files available at /var/run/s6/etc…exited 0.
[s6-init] ensuring user provided files have correct perms…exited 0.
[fix-attrs.d] applying ownership & permissions fixes…
[fix-attrs.d] done.
[cont-init.d] executing container initialization scripts…
[cont-init.d] done.
[services.d] starting services
[services.d] done.
[2022-08-15 07:34:16] frigate.app INFO : Starting Frigate (0.10.1-83481af)
*** Your config file is not valid! ***
*** Please check the docs at ***
*** Configuration File | Frigate ***
*** Config Validation Errors ***
while parsing a block collection
in “”, line 2, column 3:
- host: 192.168.88.121
^
expected , but found ‘?’
in “”, line 7, column 3:
host: mqtt.server.com
^
Traceback (most recent call last):
File “/opt/frigate/frigate/app.py”, line 312, in start
self.init_config()
File “/opt/frigate/frigate/app.py”, line 77, in init_config
user_config = FrigateConfig.parse_file(config_file)
File “/opt/frigate/frigate/config.py”, line 900, in parse_file
config = yaml.safe_load(raw_config)
File “/usr/local/lib/python3.8/dist-packages/yaml/init.py”, line 162, in safe_load
return load(stream, SafeLoader)
File “/usr/local/lib/python3.8/dist-packages/yaml/init.py”, line 114, in load
return loader.get_single_data()
File “/usr/local/lib/python3.8/dist-packages/yaml/constructor.py”, line 49, in get_single_data
node = self.get_single_node()
File “/usr/local/lib/python3.8/dist-packages/yaml/composer.py”, line 36, in get_single_node
document = self.compose_document()
File “/usr/local/lib/python3.8/dist-packages/yaml/composer.py”, line 55, in compose_document
node = self.compose_node(None, None)
File “/usr/local/lib/python3.8/dist-packages/yaml/composer.py”, line 84, in compose_node
node = self.compose_mapping_node(anchor)
File “/usr/local/lib/python3.8/dist-packages/yaml/composer.py”, line 133, in compose_mapping_node
item_value = self.compose_node(node, item_key)
File “/usr/local/lib/python3.8/dist-packages/yaml/composer.py”, line 82, in compose_node
node = self.compose_sequence_node(anchor)
File “/usr/local/lib/python3.8/dist-packages/yaml/composer.py”, line 110, in compose_sequence_node
while not self.check_event(SequenceEndEvent):
File “/usr/local/lib/python3.8/dist-packages/yaml/parser.py”, line 98, in check_event
self.current_event = self.state()
File “/usr/local/lib/python3.8/dist-packages/yaml/parser.py”, line 392, in parse_block_sequence_entry
raise ParserError(“while parsing a block collection”, self.marks[-1],
yaml.parser.ParserError: while parsing a block collection
in “”, line 2, column 3:
- host: 192.168.88.121
^
expected , but found ‘?’
in “”, line 7, column 3:
host: mqtt.server.com
^
*** End Config Validation Errors ***
[cmd] python3 exited 1
[cont-finish.d] executing container finish scripts…
[cont-finish.d] done.
[s6-finish] waiting for services.
[s6-finish] sending all processes the TERM signal.
A few screenshots: