This sensor I bought from a chinese site made me loose about a day of work to get it up and running. At first glance it could be attributed to wrong documentation, this page in particular: https://esphome.io/components/sensor/jsn_sr04t
but I actually think that at the time of writing this particular board was not yet around, and then the chinese made a mess with the naming.
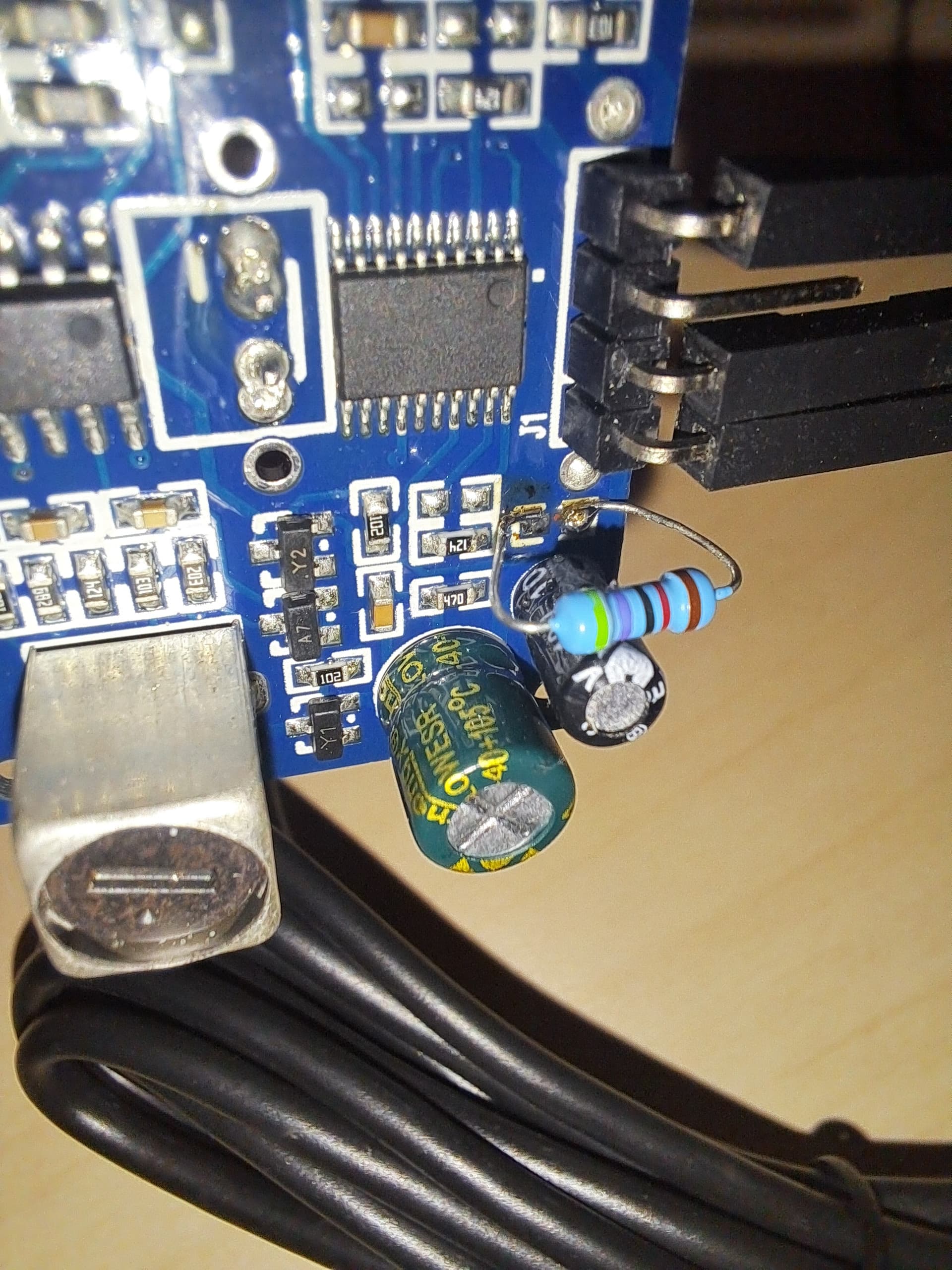
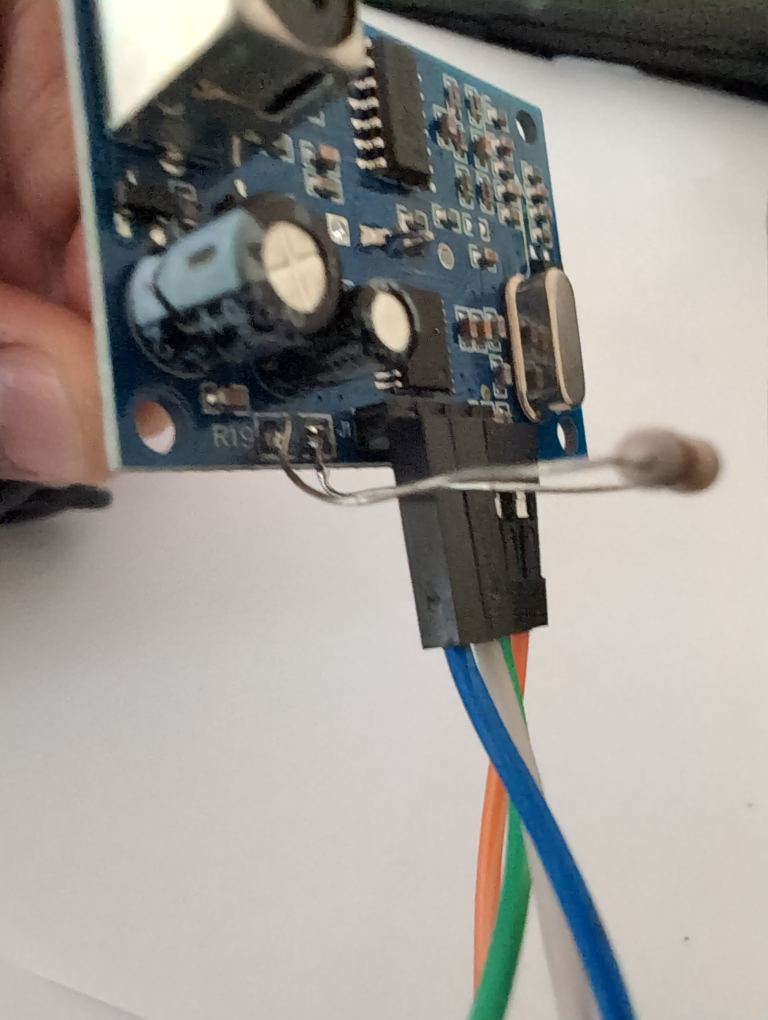
TLDR: this board (SR04M-2) has to be configured as a JSN-SR04T, from the resistor to set the operating mode, to the YAML
This is the relevant part of my working config (Mode 1 and heavy filtering to slow down the rate, prioritizing having no outlyers):
I soldered a 47k resistor to get into Mode 1, lots of data that I then can filter a lot to mitigate outlyers. I’m planning to try Mode 2 by soldering a 120k resistor or another board.
I’m using too a ESP8266 (nodemcuv2), but it’s not relevant
I’m having no luck. I can never figure out what I did wrong.
I have an ESP8266. The schematic is below.
On it, the TX is GPIO15 (D8) and the RX is GPIO13 (D7).
My board is different from yours. I used an AJ-SRO4M, with a JSN-SR04T ultrasonic sensor.
I put a 120K resistor to activate mode 2 and was inspired by your settings to control the measurement.
But, although the sensor appears online, nothing is measured.
Have you ever worked with the AJ-SRO4M?
Hi, thanks for your contribution - I am trying to get it to work for days now - I used your settings (using an ESP 32 wroom board) with Rx from the sensor going to TX on the board. The sensor shows up after compiling with “unknown” - however on the Webpage of the board I get the following checksum errors.
Now I also found this link: jsn_sr04t component: AJ_SR04M compatibility mode in checksum calculation by soeffi · Pull Request #7044 · esphome/esphome · GitHub which describes how they created a solution that should be part of the ESPhome “package”. What I have been using as yaml is the following: `uart:
id: uart_bus
tx_pin: GPIO21
rx_pin: GPIO19
baud_rate: 9600 #parity: NONE #stop_bits: 1 #rx_buffer_size: 5
(forget the buffer size - I picked that up in another post where they complained about the extra bot, however makes the board disfunctional)
— and —
sensor:
egidro
Egidijus
malaTG
20d
Hi, I had similar issue and debugged it using simple Arduino program. The issue is that checksum that is calculated is not clearly defined: the response from sensor is 4 bytes - header, high bits, low bits checksum. And some examples add highbits+lowbits and expect this to be equal to checksum, while others add header+highbits+lowbits and expect it to be checksum. Since header is always FF, it introduces this one bit change. So this is the reason. The solution at least for me was to use platform jsn_sr04t and NOT use specific model (using specific model caused 1 bit difference in checksum calculation)
sensor:
- platform: "jsn_sr04t"
name: "Distance"
update_interval: 1s
uart_id: Serial_2
# model: aj_sr04m
I left out the reference to model: aj_sr04m and it works:
I still have no luck with this. Tried both a 47k and a 120k resistor as well as removing ajsr04m from model. The blue light is blinking but sensor values shows NA. Am I doing this right?
Well, since 2 days mine is only churning out 6m distance.
I did not change anything to the code.
in the compilation I got error message:
Compiler error:
Compiling .pioenvs/esphome-test-2/src/jsn_sr04t.cpp.o src/jsn_sr04t.cpp:1:2: error: 'include' does not name a type 1 | include "jsn_sr04t.h" | ^~~~~~~ *** [.pioenvs/esphome-test-2/src/jsn_sr04t.cpp.o] Error 1 ========================= [FAILED] Took 298.41 seconds =========================
so I figured something has changed with some of the recent updates.
I restored home assistant from 2 days ago
Started a new compilation with the same program.
It started a detached heat in git (learning every day) - which too ages to compile. Then the system worked again - however with the same result - 6m no matter what I do with the sensor.
I guess someone changed something in the "jsn_sr04t.h file which is now giving different results.
Not sure where to report this. Anyone any suggestions?
I have a SRM04-2 sensor connected to a esp32. I have it tested and worked for me without a resister on R19 with .
After installing it in the water tank it reads through the water and shows the bottom of the tank in the reading.
Do I have the wrong sensor or it something wrong with the settings?