Someone please create an integration for 360 S6 
3 Likes
I currently call an alexa routine to make it work, and i use vibration sensors to know if someone called them in a different way.
it’s for roborock s7, another brand
I connected my s6 to Google Home and integrated the Google assistant sdk to my home assistant.
Now I can start, stop and return to home by the Google Home API.
It works like I say “ok Google, start cleaner” but not with my voice with a command like “start cleaner”
Hmmm… Yeah actually i did that too.
The downside is that you can’t get any status what so ever.
Its just fire and hope it works.
To get status you can install GitHub - tronikos/google_assistant_sdk_custom: Custom integration of Google Assistant SDK
1 Like
Just ordered a 360 S10 - is there a complete guide on how to get the unit into Home Assistant? Or at least what main steps and setups would be required?
I will try to set it up Im allready halfway there. When I have it, I write down how i did that and share it with you. 

Okay so i hope i can explain it well.
If not, don’t hesitate to tell me it’s not working.
The Custom Google SDK integration [tronikos] mentioned above can not only send questions in text form but also retrieve the answers from google assistant.
I tried to work with that and i must say after a bit of tinkering it works pretty good.
So here is how i did it:
1st. You need those 2 Integrations:
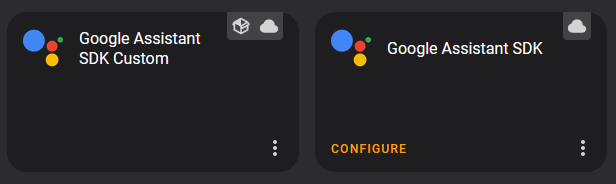
the one on the right you can get from the official integrations the one on the left is the one [tronikos] mentioned above.
Install it according to the instruction in those 2 URLs:
Official → “Google Assistant SDK - Home Assistant”
Custom → “GitHub - tronikos/google_assistant_sdk_custom: Patches Google Assistant SDK integration to allow getting responses from commands to Google Assistant.”
First the Official then the Custom one!
Spoiler : For the Custom one you need to add the repository given in the Github URL to HACS.
When you have configured them both…
2nd. Helper and Automation:
Go to Settings → Devices & Services → Helper
There, create a “Text” Helper.
Only change the Name to something like “vacuumstatus” and leave everything default.
Ok when you did this, go to
Settings → Automation & Scenes → Create New automation
Go to the 3 Dots on the right corner and “Edit in YAML”
Copy the whole Automation in there and replace what i marked with → !!!REPLACE!!!
You can STRG + F and search for it in the Automation Text.
alias: "360 Vaccum: status"
description: Gets the status of an 360 Robot via Google Custom SDK
trigger:
- platform: time_pattern
minutes: "10"
id: time
- platform: event
event_type: google_assistant_sdk_custom_event
event_data:
request: !!!!REPLACE!!!! *What is the Status of the Vaccum*(In your set Google SDK language)
id: status
condition: []
action:
- choose:
- conditions:
- condition: trigger
id: time
sequence:
- service: google_assistant_sdk.send_text_command
data:
command: !!!!REPLACE!!!! *What is the Status of the Vaccum*(In your set Google SDK language)
- conditions:
- condition: trigger
id: status
sequence:
- service: input_text.set_value
data:
value: "{{ trigger.event.data.response }}"
target:
entity_id: !!!!REPLACE!!!! input_text.YOUR_Text_Helper
mode: queued
max: 10
Ok, when you did that, your Text Helper is updating every 10 Minutes with the Vacuum Status.
You can also trigger the update manually, I show you how.
3rd: Make a GUI
Go to the Dashboard and make a new card where ever you like.
Choose manual and copy this into the card:
Don’t forget to replace what I marked with → !!!REPLACE!!!
type: vertical-stack
cards:
- type: markdown
content: >-
<ha-alert alert-type="info">{{ states('!!!!REPLACE!!!! input_text.YOUR_Text_Helper')
}}</ha-alert>
title: 360 Robot
- square: true
columns: 3
type: grid
cards:
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Start Vacuum Robot(In your set Google SDK language) !!!!REPLACE!!!!
target: {}
name: Start
icon: mdi:play
hold_action:
action: none
show_state: false
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Stop Vacuum Robot(In your set Google SDK language) !!!!REPLACE!!!!
target: {}
name: Stop
icon: mdi:stop
hold_action:
action: none
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Vacuum Robot back to charging station(In your set Google SDK language) !!!!REPLACE!!!!
target: {}
icon: mdi:ev-station
hold_action:
action: none
name: charge
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: !!!!REPLACE!!!! with the same sentence you have defined in your automnation
target: {}
icon: mdi:sync
name: get status
It should work now and look something like this.

Final Thoughts
It is way too complicated, and 360 should be ashamed of themselves for not just letting us use an API and make our own integration.
But it works pretty good! Sometimes it has a delay of up to 20 seconds or something, but I guess that’s ok for a robot vacuum.
Hope it works for you
Cheers 
1 Like
Ohh, this is great! Thanks a lot! I’ll let you know once I have set everything up 
1 Like
Quick question - I did not get the replace-part fully it seems. I’m able to get the commands running, stop and charge to work through the HA UI. But status just says “Unknown”.
I’m using en-US as my Google SDK language. Where do I find the “correct” things to put in ![]()
i.e. for !!!REPLACE!!! What is the Status of the Vaccum(In your set Google SDK language)
There, you type in the question you want to get answered by Google Assistant.
It’s like you talk to it through your smartphone, just in typed words.
For Example: “What is my robot vacuum doing?”
The response gets written in your text helper.
Then you can see the text helpers content in your UI if you add it.
Did you run this automation, and looked into your text helper?
Hi @PatpaC thank you for the guide. I can control my two Yeedi Robots with this. But for some reason the Status does not automatically update after 10 minutes. I also tried changing to 1 minute, but still does not automatically update the status.
When I press “Get Status” button, it will then fetch me the update. Any idea how to resolve so it works automatically without pressing “Get Status” button?
Hi @jellytotz,
Yeah i think i know why. I did not make that one clear.
So in your automation under actions the text for the “google sdk send” should be the same as the one above in trigger “event google custom”.
Otherwise the command gets fired in actions via the google sdk but the automation never triggers the other path cause its not the same event/phrase it is listening on.
Nice to hear that it works so far for you
Thanks @PatpaC , but I’m still a bit confused. Let me share my code.
AUTOMATION
alias: Yeedi Upstairs status
description: Gets the status of Yeedi Upstairs via Google Custom SDK
trigger:
- platform: time_pattern
minutes: "10"
id: time
- platform: event
event_type: google_assistant_sdk_custom_event
event_data:
request: Is Upstairs running?
id: status
condition: []
action:
- choose:
- conditions:
- condition: trigger
id: time
sequence:
- service: google_assistant_sdk.send_text_command
data:
command: Is Upstairs running?
- conditions:
- condition: trigger
id: status
sequence:
- service: input_text.set_value
data:
value: "{{ trigger.event.data.response }}"
target:
entity_id: input_text.vacuumstatus
mode: queued
max: 10
GUI
type: vertical-stack
cards:
- type: markdown
content: >-
<ha-alert alert-type="info">{{ states('input_text.vacuumstatus')
}}</ha-alert>
title: Upstairs Vacuum
- square: true
columns: 4
type: grid
cards:
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Start Upstairs
target: {}
name: Start
icon: mdi:play
hold_action:
action: none
show_state: false
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Stop Upstairs
target: {}
name: Stop
icon: mdi:stop
hold_action:
action: none
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Send Upstairs Home
target: {}
icon: mdi:ev-station
hold_action:
action: none
name: charge
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Is Upstairs running?
target: {}
icon: mdi:sync
name: get status
Hi Sorry for answering that late…
So far I cannot see any problems.
Have you looked into the text helper?
You can do that via developer tools → state, or just open the entity dialog or history.
Have it ever updated your text helper?
You can troubleshoot by doing this:
Go to Automations and press Edit on the automation.
Trigger/Run the automation and go into traces.
It should be triggered 2 times, one right after the other.

In each of those, there is an executed blue marked Path.
One goes to the right and one goes to the left bottom.
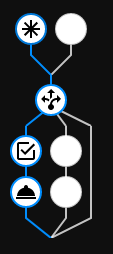

The 1st is the request to Google Assistant and the second one is the response.
If you only got 1 there is something wrong with the way you catch the response from Google.
The thing is, your YAML code looks valid to me.
Maybe there is a problem with the custom Google SDK Integration.
Hope that helps bring you on the right path to solve your problem
Oh, and I forgot to say that you can also look into changed variables in the second run, there should be the request and the response.

1 Like
Hi guys, for what it’s worth; using a S10 vacuum here.
I slightly adjusted the automation and in such a way that it will update the text field every time you press one of the four buttons. It helps me to see if the commands were parsed by Google Assistant correctly.
Code:
description: Gets the status of an 360 Robot via Google Custom SDK
trigger:
- platform: time_pattern
minutes: "10"
id: time
- platform: event
event_type: google_assistant_sdk_custom_event
event_data:
request: What is the status of Vacuum 360 S10
id: 360_status
- platform: event
event_type: google_assistant_sdk_custom_event
event_data:
request: Start Vacuum 360 S10
id: 360_start
- platform: event
event_type: google_assistant_sdk_custom_event
event_data:
request: Stop Vacuum 360 S10
id: 360_stop
- platform: event
event_type: google_assistant_sdk_custom_event
event_data:
request: Dock Vacuum 360 S10
id: 360_dock
condition: []
action:
- choose:
- conditions:
- condition: trigger
id: time
sequence:
- service: google_assistant_sdk.send_text_command
data:
command: What is the status of Vacuum 360 S10
- conditions:
- condition: trigger
id:
- 360_status
- 360_start
- 360_stop
- 360_dock
sequence:
- service: input_text.set_value
data:
value: "{{ trigger.event.data.response }}"
target:
entity_id: input_text.360_vacuum_helper
mode: queued
max: 10
I also used the stack-in-card custom card for a slightly more streamlined GUI element:
cards:
- type: markdown
content: >-
<ha-alert alert-type="info">{{ states('input_text.360_vacuum_helper')
}}</ha-alert>
title: 360 Robot Vacuum
- square: true
columns: 4
type: grid
cards:
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Start Vacuum 360 S10
target: {}
name: Start
icon: mdi:play
show_state: false
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Stop Vacuum 360 S10
target: {}
name: Stop
icon: mdi:stop
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Dock Vacuum 360 S10
target: {}
icon: mdi:ev-station
name: Dock
- show_name: true
show_icon: true
type: button
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: What is the status of Vacuum 360 S10
target: {}
icon: mdi:sync
name: Get status

I went a bit crazy and tried to build a State for the robot as it is easier to use a state in conditions and such.
Here’s the template helper for it (name: sensor.360_state):
{% if "paused" in states("input_text.360_vacuum_helper") or "stopping" in states("input_text.360_vacuum_helper") or "isn't docked" in states("input_text.360_vacuum_helper") %}
Paused
{% elif "starting" in states("input_text.360_vacuum_helper") %}
Running
{% elif "docking" in states("input_text.360_vacuum_helper") %}
Docking
{% elif "docked" in states("input_text.360_vacuum_helper") %}
Docked
{% else %}
{{ states("input_text.360_vacuum_helper") }}
{% endif %}
I also changed the automation a bit to know if the vacuum cleaner is docked if the state is paused.
I query for the status every minute as long as the state is docking, otherwise I don’t ask google assistant for status updates.
alias: CLEANING_Control_Robob
description: Gets the status of an 360 Robot via Google Custom SDK
trigger:
- platform: time_pattern
minutes: /1
id: time
- platform: event
event_type: google_assistant_sdk_custom_event
event_data:
request: What is the status of Robob?
id: 360_status
- platform: event
event_type: google_assistant_sdk_custom_event
event_data:
request: Is Robob docked?
id: 360_status_docked
- platform: event
event_type: google_assistant_sdk_custom_event
event_data:
request: Start Robob
id: 360_start
- platform: event
event_type: google_assistant_sdk_custom_event
event_data:
request: Stop Robob
id: 360_stop
- platform: event
event_type: google_assistant_sdk_custom_event
event_data:
request: Dock Robob
id: 360_dock
condition: []
action:
- choose:
- conditions:
- condition: trigger
id: time
- condition: state
entity_id: sensor.360_state
state: Docking
for:
hours: 0
minutes: 0
seconds: 10
sequence:
- service: google_assistant_sdk.send_text_command
data:
command: What is the status of Robob?
- conditions:
- condition: trigger
id:
- 360_status
- 360_status_docked
- 360_start
- 360_stop
- 360_dock
sequence:
- service: input_text.set_value
data:
value: "{{ trigger.event.data.response }}"
target:
entity_id: input_text.360_vacuum_helper
- condition: template
value_template: "{{ trigger.event.data.response == \"Robob is paused.\" }}"
- service: google_assistant_sdk.send_text_command
data:
command: Is Robob docked?
mode: queued
max: 10
In my UI I use conditions to show buttons based on the state if the Robot.
type: entities
entities:
- type: custom:template-entity-row
name: State
state: '{{ states(''sensor.360_state'') }}'
icon: fapro:broom
- type: conditional
conditions:
- entity: sensor.360_state
state_not: Running
- entity: sensor.360_state
state_not: Docking
row:
type: button
icon: ' '
name: ' '
action_name: Start
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Start Robob
target: {}
- type: conditional
conditions:
- entity: sensor.360_state
state_not: Paused
- entity: sensor.360_state
state_not: Docking
- entity: sensor.360_state
state_not: Docked
row:
type: button
icon: ' '
name: ' '
action_name: Pause
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Stop Robob
target: {}
- type: conditional
conditions:
- entity: sensor.360_state
state_not: Docking
- entity: sensor.360_state
state_not: Docked
row:
type: button
icon: ' '
name: ' '
action_name: Dock
tap_action:
action: call-service
service: google_assistant_sdk.send_text_command
data:
command: Dock Robob
title: Robob (S6 360 Vacuum)
Screenshot of UI:

do i need a google assistant for this ?