Option #1: Pass-Through Dongle (Simpler)
Update note 2022-07-03: Might be worth looking over Option #2 config as I’ve made some enhancments/refinements there.
I’m going to keep refining/editing this post as the main ‘how to’.
The majority of credit for the solution so far goes to @ssieb . He generously donated his time and knowledge to decode the UART protocol and write the ESPHome custom component (I don’t know any C++, or much about UART either). He doesn’t have one of these desks. He may be generous enough to add some more features or otherwise collaborate on it’s development if we are nice😉.
Key links:
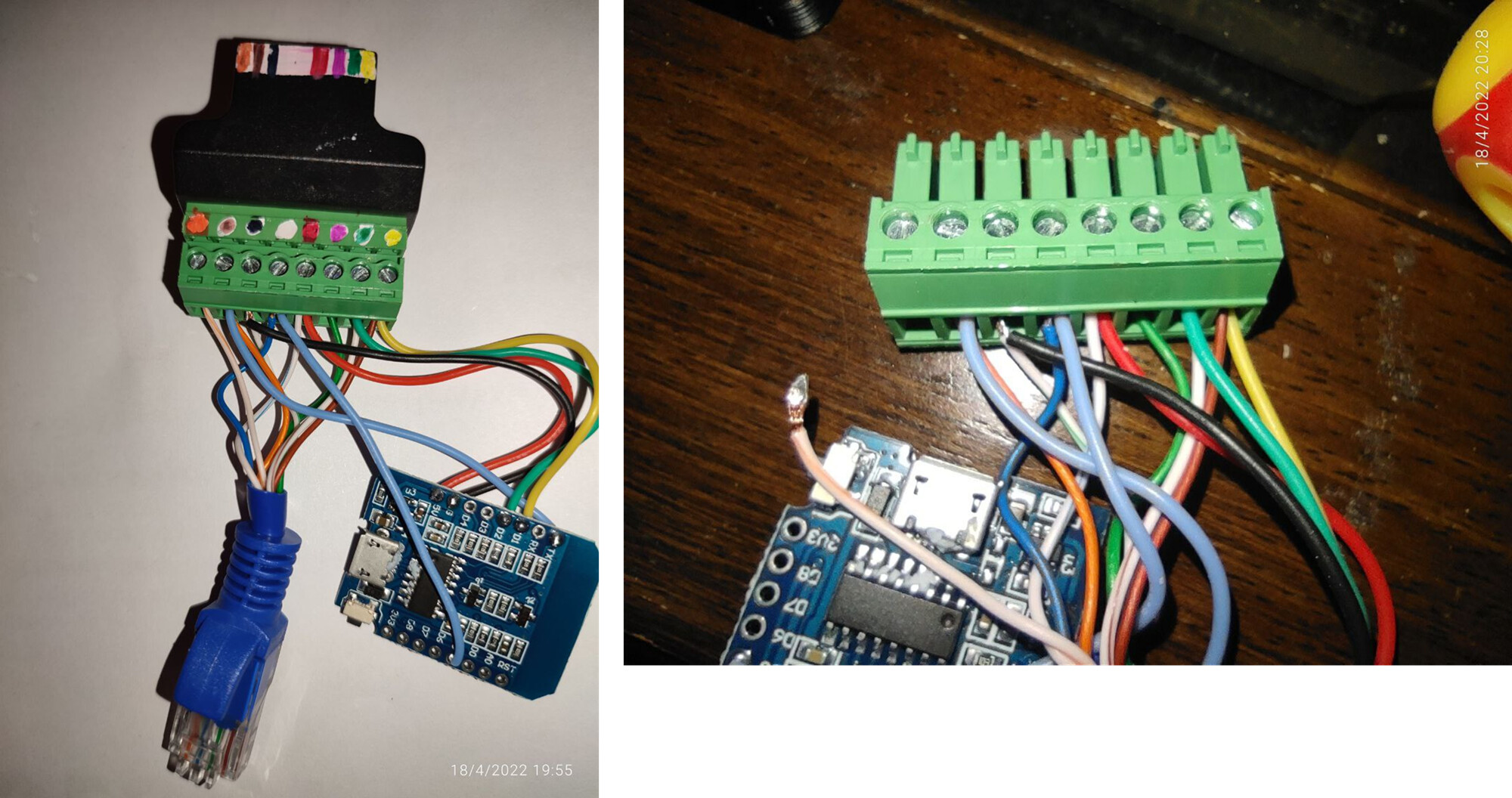
Hardware: We build ourselves a Dongle from the RJ45 port which “passes-through” 8 of 8 wires between the controller and the control panel and fork-off 6 of 8 to a d1 mini (or esp32 etc)
Parts list:
- D1mini: I think mine are probably cheap clones, but they seem to work ok. I got 6 for $18 AUD.
- An RJ45 female breakout. Google images.
- Wire – I really like this silicone wire which is very flexible for routing in small enclosures.
- Half an Ethernet cable (just cut a spare one you have laying around?)
- Enclosure: The enclosure I designed and 3d printed. It’s here on Thingiverse (added 2022-06-05). But you can mount this thing pretty out of sight under the desk, so you could for example just hot glue or zip tie all the parts to a bit of wood/plastic etc.
Soldering
If you are allergic to soldering (I used to be, but worked through it;) you could do this solder free if you pick an esp with pins already on it and buy some dupont cables.
Software:
- Use Sseib’s custom component and some of my config (optional).
- You might want to start with just using ssieb’s less bloated config (but make sure you invert the pins). Then maybe read through my config and use what you want.
- Also Sseib’s config works in mm, whereas I’ve adjust mine to generally be in cm.

Edit: 2022-06-05 Some of the config is a little dated since ssieb deployed some new features l requested. Look at his base config first.
####################################################################################################
##Notes/Info
####################################################################################################
## Home Assistant Thread: https://community.home-assistant.io/t/desky-standing-desk/383790/3
## ssieb who generously donated his time and knowledge to developing the custom component may offer some support on the Discord thread (please read both threads first).
## https://discord.com/channels/429907082951524364/952464939480645642
#Notes:
# 1. Use this component at own risk. It has not had extensive testing. May void warranty or cause desk faults etc.
# 2. This controller may bypass desk safety features like collision detection.
# 3. This component doesn't know about the values stored in your desk. Values in this config are (and must be) set independently.
# 4. ssieb's solution may be a lot simpler and cleaner for most people. I've cobbled together some more features in this config because I can't programn in C++.
#Troubleshooting Tips:
#If you ever get a flashing ASr message, you might need to reset your desk.
#https://desky.com.au/blogs/news/reset-standing-desk-control-panel#:~:text=When%20ready%2C%20press%20and%20hold,Hooray!
#TODO
#Ask ssieb to make change requests (move logic to component code)
# Invert pins
# Get Desk Height On Boot
# Interlock Up/Down Pins (If not done already)
# Interrupt/stop movement function (Stop desk motion)
#other
# Test collision detection
# Limit external component fetch to just desky?
# Fix Desk Is moving on Boot.
esphome:
name: desky-d1mini-v2
platform: ESP8266
board: d1_mini #pinout: https://i0.wp.com/randomnerdtutorials.com/wp-content/uploads/2019/05/ESP8266-WeMos-D1-Mini-pinout-gpio-pin.png?quality=100&strip=all&ssl=1
on_boot:
priority: -100.0
then:
#Request a desk height update after boot.
- delay: 5s
- switch.turn_on: wake_desk_and_get_height
wifi:
ssid: "NotTellingYouThat"
password: "NopeItsMySecret"
api:
ota:
logger:
# level: VERY_VERBOSE ##Uncomment to see UART debug messages
external_components:
#Fetch ssieb's custom component# https://github.com/ssieb/custom_components/tree/master/components/desky
- source:
type: git
url: https://github.com/ssieb/custom_components
components: [ desky ]
uart:
- id: desk_uart
baud_rate: 9600
rx_pin: 1 #Labelled TX on my D1mini clone (mislabelled?)
##You can uncomment the debug section below to see UART messages.
# debug:
# direction: RX
# dummy_receiver: true
# after:
# bytes: 4
# sequence:
# - lambda: UARTDebug::log_int(direction, bytes, ',');
desky:
id: my_desky
####################################################################################
##Uncomment this block to use Ssieb's move_to componet function.
# up:
# number: 4 #D2
# inverted: true
# down:
# number: 5 #D1
# inverted: true
# stopping_distance: 15 # optional distance from target to turn off moving, default 15
####################################################################################
height: # Sensor publishing the current height
name: Desky Height
id: desky_height
accuracy_decimals: 1
unit_of_measurement: cm
#any other sensor options
filters:
- delta: 0.05 #Only send values to HA if they change
- throttle: 200ms #Limit values sent to Ha to 5 per sec.
- multiply: 0.1 #convert from mm to cm
on_value:
then:
#If the value changes, then the desk is moving
- binary_sensor.template.publish:
id: desky_is_moving
state: ON
- delay: 300ms
#Assume it's stopped moving if no height changes after a short time.
- binary_sensor.template.publish:
id: desky_is_moving
state: Off
binary_sensor:
- platform: template
id: desky_is_moving
name: "Desky Is Moving"
filters:
- delayed_off: 400ms
#If the desk isn't moving for a bit we better turn off attempts at movement. It's like poor man's collision detection?
on_release:
then:
- button.press: desky_stop_desk
button:
#Stop movement
- platform: template
name: Stop Desk
id: desky_stop_desk
on_press:
then:
- switch.turn_off: raise_desk
- switch.turn_off: lower_desk
#Move to function
- platform: template
name: Go To Desky Height x
id: go_to_desky_preset_height_x
on_press:
then:
##Option 1: Uncomment to use Ssieb's move_to componet functions
# - lambda: id(my_desky).move_to(id(desky_target_height).state*10);
##Option 2: Uncomment to use Mahko's lambda alternative
#Check if we need to move desk up or down from current position
if:
condition:
#Current height is more than target height, then move desk down
lambda: |-
return id(desky_target_height).state < id(desky_height).state;
then:
- switch.turn_on: lower_desk
- wait_until:
#Run until the difference between current and target state is < stopping distance
condition:
lambda: return abs((id(desky_height).state - (id(desky_target_height).state)))<(id(stopping_distance_cm).state);
- switch.turn_off: lower_desk
else:
#Current height is less than target height, move desk up
- switch.turn_on: raise_desk
- wait_until:
condition:
lambda: return abs((id(desky_height).state - (id(desky_target_height).state)))<(id(stopping_distance_cm).state);
#Run until the difference between current and target state is <0.3cm
- switch.turn_off: raise_desk
number:
#Target Height ("Move desk to height x").
#You should probably limit the range you can move the desk to to within the limits you've set via the control panel, perhaps offset a little within the range.
#Sending commands higher/lower than this may cause error messages and require desk reset (or worse).
- platform: template
id: desky_target_height
name: "Desky Target Height"
optimistic: true
unit_of_measurement: cm
min_value: 80
max_value: 130.0
step: 0.1
#Offset correction - Adjust until you get the best accuracy.
#The desk keeps moving for a little while after the up/down pins are released and we try to account for this.
#1.5cm was about right on mine
- platform: template
name: "Desky Stopping Distance cm"
id: stopping_distance_cm
unit_of_measurement: cm
optimistic: true
min_value: 0
max_value: 2
step: 0.1
restore_value: true
initial_value: 1.5
###############################################
#Define some preset heights.
###############################################
#You can freely define as many adjustable presets as you like.
#These are all seperate/independant of what you've set via the control panel (we can't retrieve them currently).
#Standing Height #1 - Set a standing height.
- platform: template
id: desky_standing_height_1
name: "Desky Standing Height 1"
optimistic: true
unit_of_measurement: cm
#Limit the range
min_value: 120
max_value: 130
step: 0.1
restore_value: true
initial_value: 124
#Sitting Height #1 - Set a sitting height. This is independant of what you've set via the control panel.
- platform: template
id: desky_sitting_height_1
name: "Desky Sitting Height 1"
optimistic: true
unit_of_measurement: cm
#Limit the range
min_value: 79.7
max_value: 82
step: 0.1
restore_value: true
initial_value: 79.9
switch:
#wake up ther desk and request it sends its height
- platform: gpio
id: wake_desk_and_get_height
name: "Request Desk Height"
pin:
number: D5
inverted: true
on_turn_on:
- delay: 100ms
- switch.turn_off: wake_desk_and_get_height
#Raise the desk
- platform: gpio
id: raise_desk
name: "Raise Desk"
pin:
number: D2
# mode: INPUT_PULLUP
inverted: true
interlock: lower_desk
on_turn_on:
#Auto off after 15s just in case
- delay: 15s
- switch.turn_off: raise_desk
#Lower the desk
- platform: gpio
id: lower_desk
name: "Lower Desk"
pin:
number: D1
# mode: INPUT_PULLUP
inverted: true
interlock: raise_desk
on_turn_on:
#Auto off after 15s just in case
- delay: 15s
- switch.turn_off: lower_desk







