When logging the UART interaction I do see mov_ and occ_ values when moving in front of the sensor and when nothing is moving in front of the sensor.
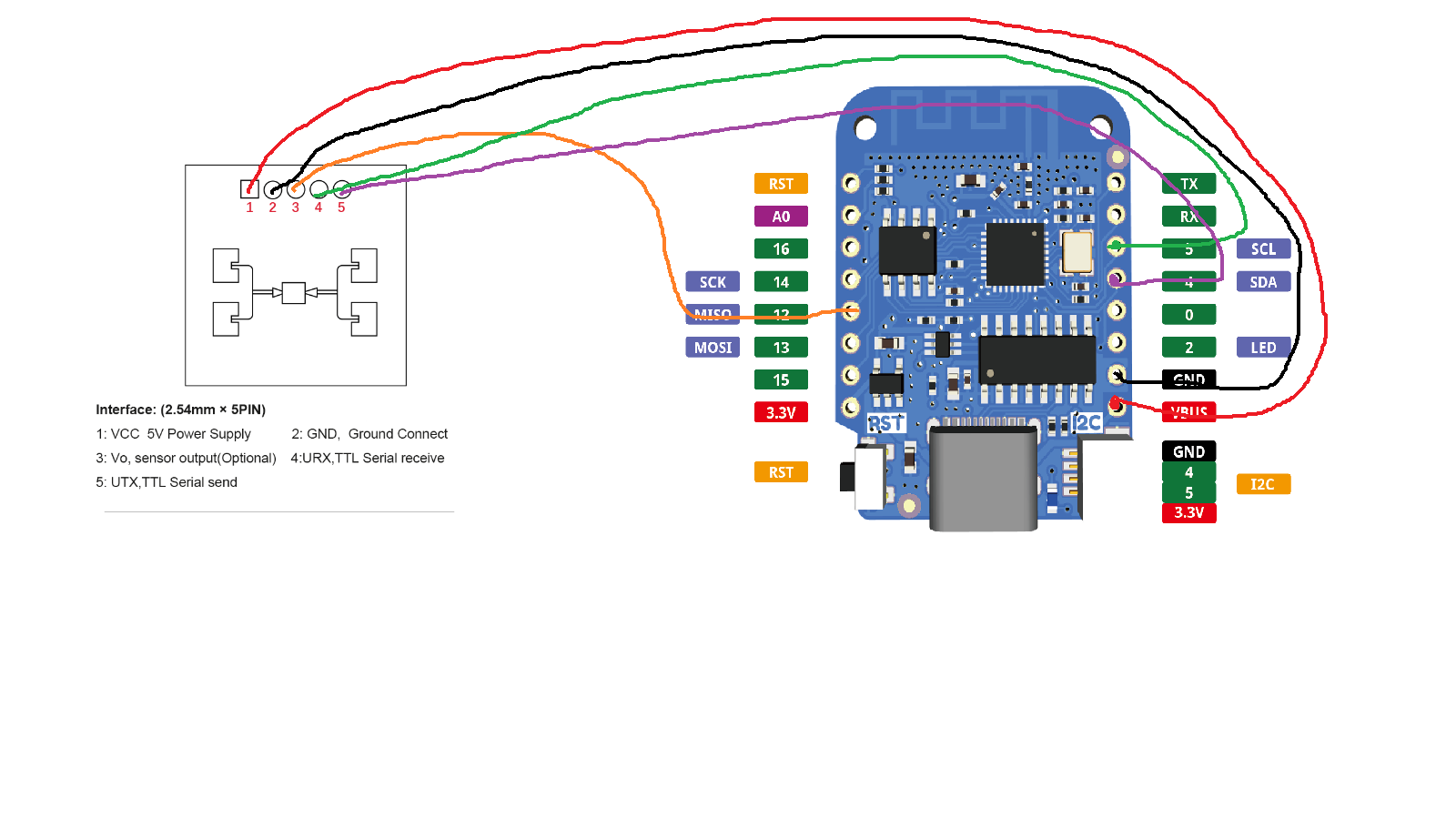
I’m not sure how to use the Vo, sensor output pin and if it provides anything useful. I thought it would be similar to the DFRobot chip and output true/false depending on if motion is detected.
If the Vo pin doesn’t provide anything useful, I still need to figure out how to translate the mov_ and occ_ values to a binary sensor for use in home assistant automations.
I now have a multimeter. I’m not 100% sure how to test the pin. Would I just put the multimeter on DC voltage and then put the common on the wemos d1 mini’s ground and then the red tester on the GPIO pin and then simulate motion?
ERROR Error while reading config: Invalid YAML syntax:
while parsing a block mapping
in “/config/esphome/esphome-web-d25724.yaml”, line 154, column 3:
- platform: gpio
^
expected , but found ‘’
in “/config/esphome/esphome-web-d25724.yaml”, line 159, column 5:
mode:
^
Edit: number: ${LD1115H_INPUT_PIN} has extra indent
Hello. Can you please share the whole datasheet for the sensor? I hope what is in the photo is not the whole document. I have the sensor working and outputting data right now but I want to make it configurable via ESPHome. Now I am sending commands and nothing changes.
I’m so glad I found this thread! I’ve also ordered the HiLink HLK0LD1115H as a substitute to the DFrobot-variant. I had some trouble hooking everything up, but using this thread helped me a lot.
I’ll come back if I get some of the solution above working