I’m trying to get my ultrasonic sensor to work with ESPHome. The sensor is a JSN-SR04T-AJ-SR04M which is similar to the HC-SR04 but not exactly the same. So using the default ESPHome template ‘ultrasonic’ doesn’t work (wrong distance values are show, only 2 out of 10measurements are somewhat correct).
The SR04 has different modes, I soldered a 47kΩ resistor into the R27 Pin to enable the “contious mode”. In this mode the distance calculation is done on device all the time. To get the distance on can use the UART to retrieve the data.
Now I’m struggling with implementing this in ESPHome. I read that it is possible to add custom UART components, but I’m not sure if this is necessary in my case, or if I’m able to just receive the data using the regular uart integration.
The code to read the data from the sensor every two seconds looks like this in Python:
import serial
import time
import sys
ser = serial.Serial('/dev/ttyUSB0') # open serial port
byte = b'\xff' # xff is the start byte
while True:
x = ser.read()
if x == byte: #starbyte found
b1 = ser.read(1)
b2 = ser.read(1)
x1 = int.from_bytes(b1, sys.byteorder)
dist = (((x1 << 8) + int.from_bytes(b2, sys.byteorder)) / 10) # some bitshift magic, no idea what's happening here
print(dist - 5) # for some reason the distance value is 5cm off, remove them before printing the value
clear = ser.read_all()
ser.flushOutput()
time.sleep(2)
There is also a german blogpost with some arduino examples for the different modes of the sensor, which I used to implement my python example above:
I hope that someone could give me a hint in the right direction since I’m not an arduino pro as you can probably see, thanks in advance for helping me out
@bullar@walberjunior
I’m in same hell as you were earlier.
I had ordered JSN-SR04T but received AJ-SR04M with limited resources of information for setting it up.
My problem is explained in other query. Then found this page and your messages.
First realization was the type of the sensor, then the operational mode (soldered 120kΩ resistor for enabling the “Automatic Serial Mode” as per the link).
Following your instructions, I have succeeded to have some activity on the board of the sensor (blue blinking led) but the “Distance” is returning error (unknown).
Im using a ESP32 Development Board ESP32-WROOM-32U and GPIO12 and GPIO14 are in use.
If observing the log in real time, is not returning any error message as other trials (before soldering resistore, etc)
Any clue?
Thanks for your response,
I did the reverse of Tx and Rx and immediately I got a quick flashing of the blue led. So It was a good start.
I have tried both 0x00 and 0x55, copied exactly as it is on the above posts. The funny thing was that I had a measurement in both cases although with unexplained lag and freezes. After last test with option 0x01, in your posted example, I cant see anything in the debug log or in ESPHome integration. The blue led still is flashing. In every change I did a complete reboot of the Home aasistant pc and the ESP32 board. Other sensors on the same ESP board, 3x dallas for temperature, are working flawlessly.
Here my config files:
/config/esphome/AJ_SR04M_Sensor.h
#include "esphome.h"
class AJ_SR04M_Sensor : public PollingComponent, public UARTDevice, public Sensor {
public:
AJ_SR04M_Sensor(UARTComponent *parent) : PollingComponent(5000), UARTDevice(parent) {}
// AJ_SR04M_Sensor format:
// Trigger: 0x00
// Response: Byte1 Byte2 Byte3 Byte4 Byte5
// Start Byte=FF MSB LSB Checksum (LSB+MSB) 00
void update() override {
char frame[5];
int pos = 0;
float value = 0.0;
write(0x00);
while (available()) {
frame[pos] = read();
pos++;
if(pos==5) {
if ((frame[0] == 0xFF) && (frame[4] == 0x00) && ((frame[1]+frame[2])==frame[3])) {
value = ((frame[1]<<8) + frame[2]) / 10.0;
publish_state(value);
}
break;
}
}
}
};
Ok,
I’m going to solder a 47KΩ at R19 for activating the “Low Power Serial Mode” and reverting with results.
What code should be changed if remaining into “Automatic Serial Mode”?
Edit1.This link is for the specific model that I have in my hands, labeled AJ-SR04M and resistors value is different than JSN-SR04T. I’m highlighting this for the sake of clarity.
Edit2. After the soldering of the 47KΩ at R19 the blue led is flashing every 5-6 seconds
I have try
write(0x00); not any indication in logs or in esphome
write(0x55); not any indication in logs or in esphome
write(0x01); not any indication in logs or in esphome
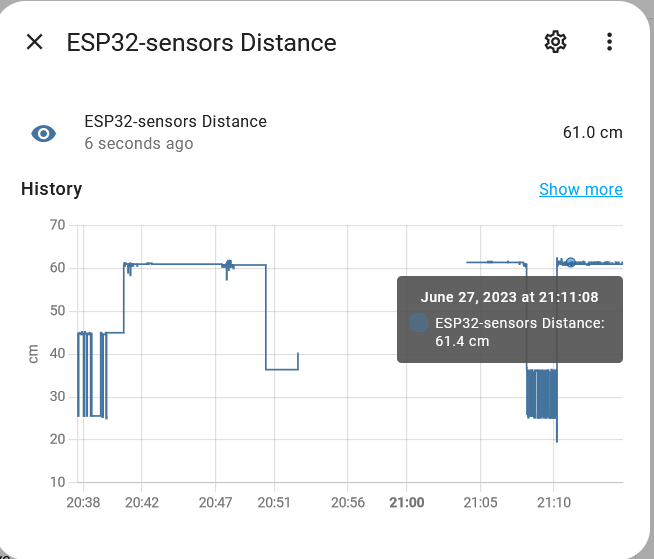
The two screen shots are the debug logs and the integration. the theird one is the history of the sensor. As you can see yesterday after soldering the resistor and trying x55 amd x00 was visible some measurements althouth with lag which situation I can reproduce anymore.
I’m trying various things,
first finding is that your config is different than tuxflo’s,
with yours I’m receiving distance athought with lag (does not matter if it is 47kΩ or 120)
Now recompilling with 01, reverting
Edit1. with 47kΩ, your posted config, with 0x01 is working, updating fast. Accuracy is a question, sometimes 10cm plus , other time ok.
** Edit2. If I’ll unplug the esp32 board from power supply then I have to reinstall/recompile the settings before having readings!!! Alternatively unlpug the Tx or Rx pin (very weird) **
See screenshot, 1)anything to improve it? 2) how to add a sensor with the quantity and %
no any chance to test the esp8266 board, the board type or the framework is not passing the validation, therefore no time or knowledge from my side for this anymore.
I went to the basement and removed one ESP32-cam for testing . I used the second sensor with this board and it was working flawlessly ! responding immediately after reboot, used pins
tx_pin: GPIO3
rx_pin: GPIO1
This made me suspicious for the pins of the initial board.
I have tried any combination of pins ESP32-WROOM-32U but the results were the same. No responding after a reboot unless remove the pin tx or rx of the sensor.
I have removed the dallas sensors from the ESP32-WROOM-32U but no change, issues after reboot is there.
I have removed everything related to dallas sensors from config. I have recompiled it, its working immediately after it (as usual) but not after reboot. WTF is the matter with this board?
Thanks for your patience!
I have exchange the sensors to the boards. Reboot issue only with ESP32-WROOM-32U.
The issue occuring with the particular board and I have no idea what could be!
The only reason that Im insisting with that board is the external antena that could be used with it due to the poor wifi coverage at the place of installation
Edit1. I got by express courier and on high price a D1 mini, delivered while ago, I did the same setup as ESP32-cam, in selected GPIO, in connections, in config file etc still have same results.
D1 min (as ESP32-WROOM-32U) when rebooting is not communicating with sensor unless remove the tx or Rx pin as kick start.
ESP32-cam is NOT working fine (anymore) after reboot!!! Not any more!
I did it again, no difference. It should be disconnect/reconect the tx or rx pin before resuming measurements. Its a mystery for me!
Other observation is the need for common source of power/grounding for a responsive sensor (before reboot).