Ok so I have 2 zones, and i just noticed they somehow were on top of each other, they weren’t when I set them, so idk why it bugged me, I just fixed them and wonder if this will fix something.
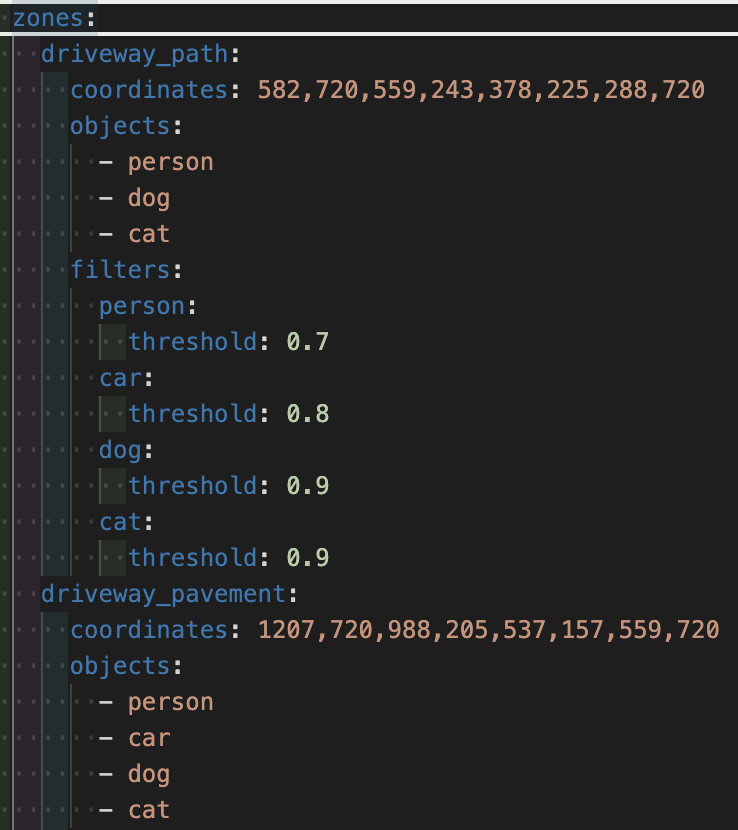
Here is what the zones look like, again I don’t need to be spammed with car notifications, just when it leaves and enters the zone. Lemme know if Im not understanding right.
So we need two zones for the object in question. Yes you have two but your car only goes into one and you need to set them both as required zones.
So for your setup I would make another zone above the driveway pavement one. Then you set required zones for car objects to the top one of those zones. This way the stationary car gets ignored and it will get detected only when arriving and leaving.
Now the fact the car is visually in both driveway zones doesn’t matter, as an object’s position is determined by the middle of the bottom of the bounding box. So right now if you had a zone starting above the 2022 of your date and covering the entire screen except below that, the car would not be in that zone.
You could actually just split your existing driveway pavement zone in half and it would work for the same reason, assuming you always park far enough forward for the bumper to enter the lower zone.
Ah, I see so it only detects it when it’s entering the driveway, not when its in it the whole time, smart!
I guess I will remove “car” from the other zone of course, but I currently have a mask everywhere but there so I guess I would need to remove it in that area first, right?
Ok so if I’m understanding this correctly, here are the zones I have right now, the one actually on the driveway pavement has the “car” object, the walking path, so if I split that in half and put a 2nd zone on the back half of the car from the middle, then only have the “car” object in that zone, it should be fine?
Also even though I have ‘car’ only in that small zone, it’s normal for it to show ‘car’ under debug on the whole thing, right?, maybe cuz I have car as an object for the overall camera too, not just the zone, and as you can see my neighbours car isn’t even in any of the zones. Just wondering.
Any traces for the automation that will show what’s not working?
Please paste the yaml of your automation.
You need to ensure mqtt messages are working, check frigate and mqtt broker logs for errors in general. There are third party add-ons that allow you to browse the mqtt messages if you’d like to dig deeper.
Need to understand where it’s failing to help
There’s also an issue some users have reported after upgrading to the latest version of frigate. This is easily fixable if you think this is the issue.
No trace is occurring, the automation is not triggered.
I’m subscribing to the mqtt events through the broker and seeing them triggered, as well as the device’s HA entities are properly changing state. I’d assume that means that mqtt is working.
I just upgraded to the latest version, which seem to have broken the best.jpg drop. Which is why I was trying this BP.
If you do see a related error. Somewhere around line 160 of the blueprint are two variables fps and fps value. Delete them both and replace them with this single line
fps: "{{ states('sensor.' + camera + '_camera_fps')|int(5) }}"
I did have template related errors related to undefined values (is there not a validator of some sort to prevent those errors in templates, almost every sensor in the world sometimes returns undefined /rant ). Your solution solved those errors, but I still am not getting a triggered automation, periodically. Funny enough, while I was posting this, it worked. I’m at a loss to say why it does or doesn’t.
Seems to be working more reliably now. I have no explanation. Motion events are spot on, entities change and events are recorded in Frigate. I did upgrade to the hotfix today, maybe that was it.
Finally got this working after the update. I’d love to see conditions added to the BP. For example I have camera I only want notifications from when an input select has a particular value, or at a particular time of day, etc.